| title | date | tags | |
|---|---|---|---|
GAMES101-assignment2-ZBuffuer |
2021-11-11 |
|
详细代码 我认为这次的assignment的重点有三个:
- 三角形内的判断
- 三角形边界的确定
- 深度buffer
判断一个点是否在三角形内是通过叉乘来判断的,假设一个点为P,我们与三角形的三个顶点相连,并分别令为PA,PB,PC,那么需要计算PAPB, PBPC, PCPA的叉乘,只要三个结果同号,那么该点就在三角形内。这里需要注意一下叉乘的顺序,倘若把PCPA写为PAPC,结果就会大不相同。
static bool insideTriangle(int x, int y, const Vector3f* _v)
{
//TODO : Implement this function to check if the point (x, y) is inside the triangle
//suppose the coordinate of p is (x,y)
x = x + 0.5f;
y = y + 0.5f;
std::pair<float,float> pa = std::make_pair(_v[0][0]-x, _v[0][1]-y);
std::pair<float,float> pb = std::make_pair(_v[1][0]-x, _v[1][1]-y);
std::pair<float,float> pc = std::make_pair(_v[2][0]-x, _v[2][1]-y);
float papb = cross_product(pa,pb);
float pbpc = cross_product(pb,pc);
float pcpa = cross_product(pc,pa);
if( (papb > 0 && pbpc > 0 && pcpa >0) || (papb < 0 && pbpc < 0 && pcpa < 0) )
return true;
return false;
}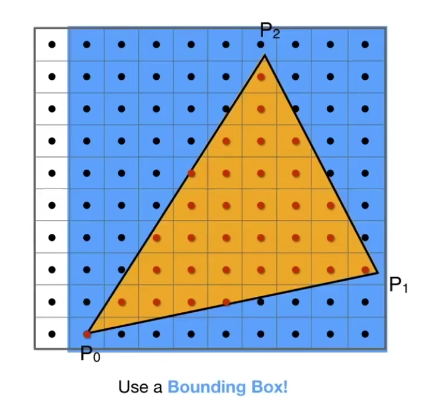
通过对三角形的边界进行确认,可以加速光栅化的过程,具体代码如下:
//确定bounding box的坐标
int left = std::min(v[0][0],std::min(v[1][0],v[2][0]));
int bottom = std::min(v[0][1],std::min(v[1][1],v[2][1]));
int right = std::max(v[0][0],std::max(v[1][0],v[2][0])) + 1 ; //向上取整
int top = std::max(v[0][1],std::max(v[1][1],v[2][1])) + 1;代码中维护了一个depth_buf,如果当前要绘制的像素离摄像机近,那么才绘制,否则不绘制。具体的相关代码也很简单:
int index = get_index(x,y);
if(z_interpolated < depth_buf[index] ){ // if near
Eigen::Vector3f point;
point << x,y,z_interpolated;
Eigen::Vector3f color;
set_pixel(point,t.getColor());
depth_buf[index] = z_interpolated;
}