| title | date | tags | |
|---|---|---|---|
GAMES101-assignment6-光线追踪的加速 |
2022-03-07 |
|
光线追踪之BVH加速
运行结果:
这次作业使用了BVH来对光线追踪实现了加速,其中有两个地方比较重要:
- 如何实现光线和Axis-Aligned Bounding Box(AABB)求交。
- 如何实现光线和BVH的一个node求交。
这个的具体做法在GAMES101课程里已经讲的很清楚了:
使用六个平面来定义出一个box:
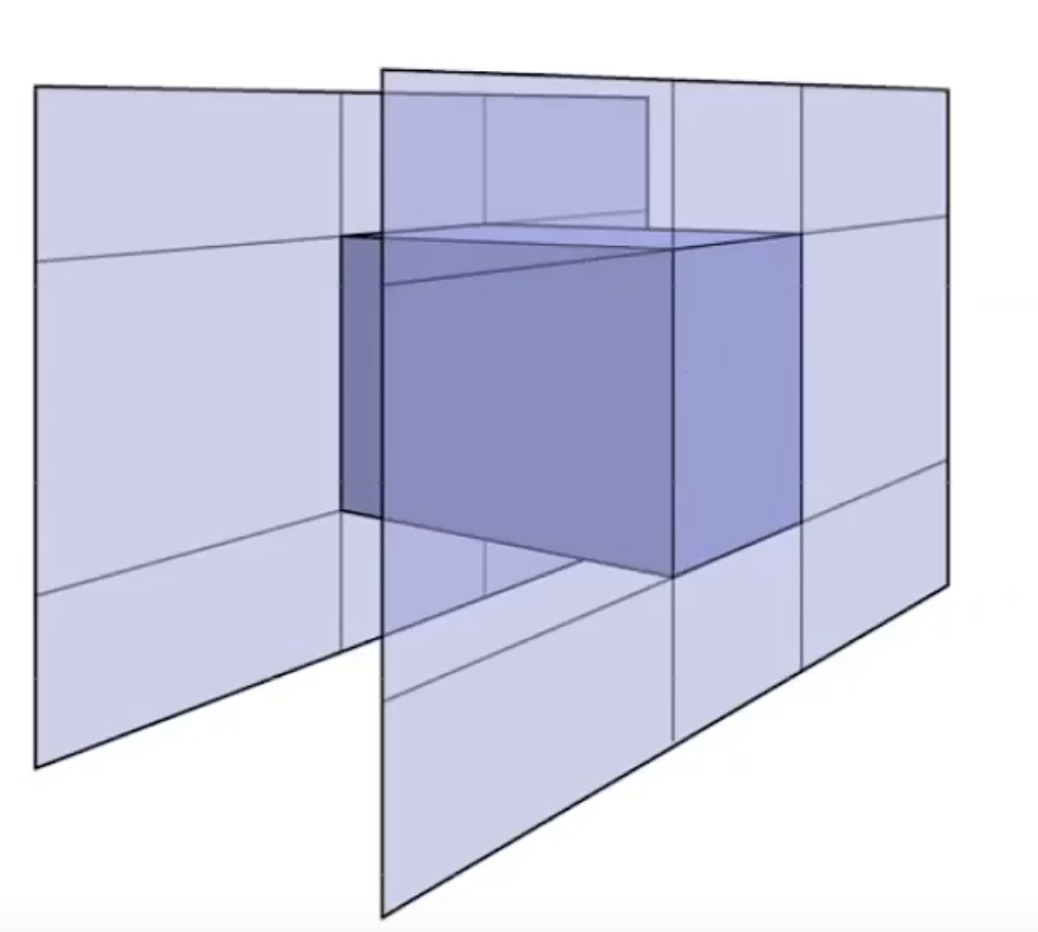
然后计算光线与这六个平面相交的时间,因为是axis-aligned的,所以可以采用正视图/侧视图/俯视图的方式来简易计算求交的时间。
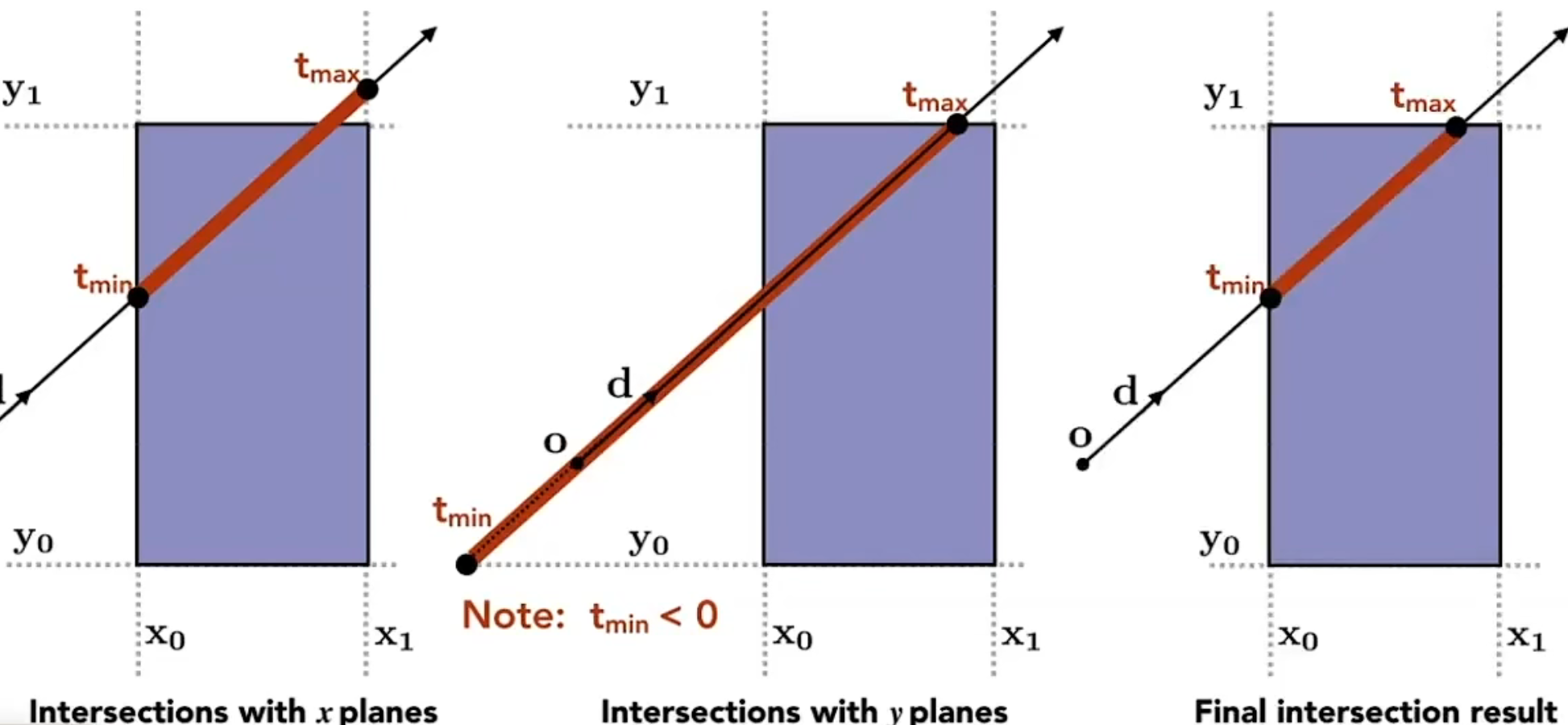
对于每一个axis,可以计算出两个平面的求交时间分别为t_min和t_max,于是最后我们可以得到三组t_min, t_max。
最后取一个交集,就能够计算出光线进入这个box的t_min, t_max:

具体的代码如下所示:
inline bool Bounds3::IntersectP(const Ray& ray, const Vector3f& invDir,
const std::array<int, 3>& dirIsNeg) const
{
// invDir: ray direction(x,y,z), invDir=(1.0/x,1.0/y,1.0/z), use this because Multiply is faster that Division
// dirIsNeg: ray direction(x,y,z), dirIsNeg=[int(x>0),int(y>0),int(z>0)], use this to simplify your logic
// TODO test if ray bound intersects
/**
* 包围盒的元素:Vector3f pMin, pMax;
* 由 location = origin + time * direction --> time = (location - origin)/direction
*/
float t1,t2 = 0;
//这里不能在最后直接乘一个+-1来改变time的正负,不然要出事
t1 = (pMin.x - ray.origin.x) * invDir.x;
t2 = (pMax.x - ray.origin.x) * invDir.x;
float x_tmin = (dirIsNeg[0] > 0) ? t1 : t2;
float x_tmax = (dirIsNeg[0] > 0) ? t2 : t1;
t1 = (pMin.y - ray.origin.y) * invDir.y;
t2 = (pMax.y - ray.origin.y) * invDir.y;
float y_tmin = (dirIsNeg[1] > 0) ? t1 : t2;
float y_tmax = (dirIsNeg[1] > 0) ? t2 : t1;
t1 = (pMin.z - ray.origin.z) * invDir.z;
t2 = (pMax.z - ray.origin.z) * invDir.z;
float z_tmin = (dirIsNeg[2] > 0) ? t1 : t2;
float z_tmax = (dirIsNeg[2] > 0) ? t2 : t1;
float t_enter = std::max(x_tmin,std::max(y_tmin,z_tmin));
float t_exit = std::min(x_tmax,std::min(y_tmax,z_tmax));
if(t_enter < t_exit && t_exit >= 0){
return true;
}
return false;
}注意这里是通过判断光线的方向是否为正/负来判断为每一个轴的t_min和t_max来赋什么值,这里不能直接给t直接乘一个正负号,因为后面要判断t_exit >=0 ,如果正负号改变了,那么后面应该也要改,就比较复杂了。
这就是一个简单的递归:
- 首先让光线与node对应的bounding box求交,如果没有交点,那么返回空。
- 如果光线与node的bounding box 有交点而且node是叶子节点,那么让光线与叶子节点里的物体求交,并且返回 intersection。(根据这个项目其他部分的代码可以看出,每一个叶子只有一个物体,不会包含多个物体)
- 如果光线和node的bounding box 有交点而且node不是叶子节点,那么与左右儿子分别相交获取交点,并且返回比较近的那个。
Intersection BVHAccel::getIntersection(BVHBuildNode* node, const Ray& ray) const
{
Intersection _intersection;
// TODO Traverse the BVH to find intersection
Vector3f invDir = ray.direction_inv;
std::array<int, 3> dirIsNeg = {int(ray.direction.x > 0), int(ray.direction.y > 0), int(ray.direction.z) > 0};
if(!node->bounds.IntersectP(ray,invDir,dirIsNeg) || node == nullptr){
return _intersection;
}
if(node->left == nullptr && node->right == nullptr){
//如果是叶节点,与叶节点的objects相交,并且返回intersection
return node->object->getIntersection(ray);
}
Intersection hit1 = getIntersection(node->left,ray);
Intersection hit2 = getIntersection(node->right,ray);
return (hit1.distance < hit2.distance)?hit1:hit2;
}