
在 Unsplash 上由 Bram Van Oost 拍摄的照片
自动驾驶汽车也称为自主汽车,能够在驾驶员很少或没有输入的情况下驾驶。看到一辆完全自动驾驶的汽车投入使用是人们长久以来的梦想之一。最近,由于人工智能和计算资源领域的进步,“自动驾驶汽车”成为科技界的热门词汇之一。
许多汽车公司,如宝马、博世,以及科技巨头,如 waymo(之前谷歌的自动驾驶汽车项目)、特斯拉、英伟达、高通,都开始投资自动驾驶汽车。
从每天的事故和死亡来看,大多数时候都是由人为错误造成的。作为一台机器,自动驾驶汽车不太可能犯错误,因此减少了事故。
另一个原因,我认为是舒适惬意的生活方式。想象一下,在办公室完成繁重的工作后,你的车送你回家,而你在车里休息。好极了。
正如一句著名的谚语所说“罗马不是一天建成的”,自动驾驶汽车不可能在给定的时间内发展成那样。多年来,汽车制造商试图改善人们的驾驶和安全,
- 自适应巡航控制
- 驾驶监控
- 高级驾驶员辅助系统
- 车道检测
- 物体探测和接近警报系统
- 速度调节和控制
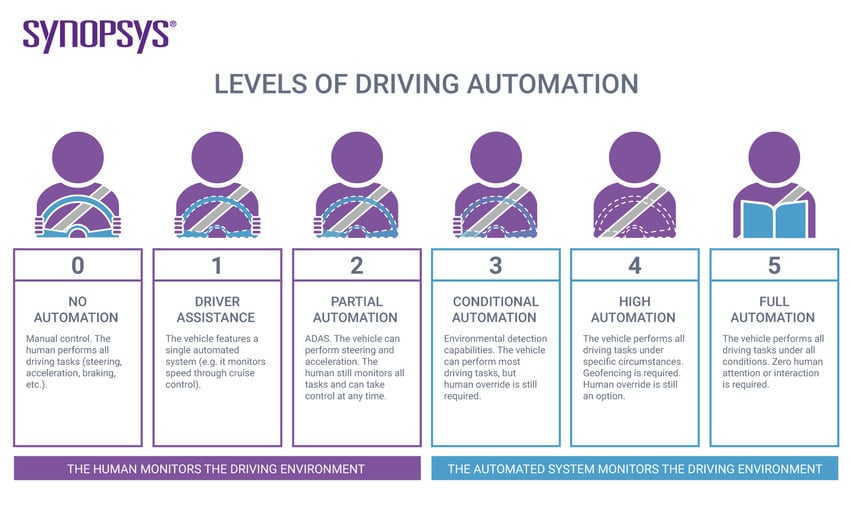
这些都是一些已经到位的系统,帮助司机提高驾驶体验。这些系统现在将成为完全自动驾驶汽车的子模块。车辆的自主能力由嵌入在车辆/汽车中的系统以及发生任何故障时的后备功能决定。在此基础上,汽车工程师协会(SAE)定义了 6 个不同级别的自动驾驶汽车。

自动驾驶汽车的等级(来源
{kind=link}
0、1、2 等较低级别将需要人工监控和驾驶。在 3 级中,车辆可以自己完成一些任务,但在关键情况下仍然需要人工干预。虽然第 4 级和第 5 级是自主的,但第 4 级为驾驶员提供了可选的手动控制,以便在紧急情况下接管。要详细了解自动驾驶汽车的水平,请访问我之前的博客这里。
主要有三个系统帮助自动驾驶汽车在环境中行驶。他们是,
- 感觉
- 规划
- 控制
这个系统负责环境感知。意识到环境。由于来自单一传感器或单一类型传感器的数据不可靠,该系统包含多个传感器,如相机、激光雷达、雷达、声纳等。摄像头、激光雷达和雷达是自动驾驶汽车中使用最广泛的传感器。
有趣的事实:一些像 waymo 这样的公司开始使用麦克风作为自动驾驶汽车的耳朵,以听到来自车辆的声音。
摄像头是自动驾驶汽车的眼睛,类似于人类驾驶员的眼睛,对理解环境有重大作用。使用对象检测和分割算法,相机数据用于检测汽车的无障碍路径。相机是一个被动传感器,这意味着它只捕捉来自环境的光线,而不是相反。这使得摄像机很难在夜晚或黑暗中像在白天一样高效地工作。立体相机是一种适合自动驾驶汽车的相机,与单色相机相比,它可以提供一些关于距离和环境 3D 视图的见解。
雷达已经被广泛应用了一段时间。它有助于使用 3d 点云查看环境的三维视图。它是一个有源传感器,这意味着它发出光,并在返回时捕获它们,基于这些光进行计算。

激光雷达图像样本(作者: SemanticKitti
由于激光雷达是一种主动传感器,波长接近可见光谱,因此它与日光有很多干扰,并降低了性能。并且它对发射光的强度也有自己的措施,以避免对人眼造成伤害。
最后,由于尺寸和价格的原因,激光雷达传感器在自动驾驶汽车中的使用存在很多争议。虽然像 waymo 这样的公司非常依赖激光雷达数据,甚至开始建立自己的激光雷达传感器,但像特斯拉这样的公司认为,即使没有激光雷达传感器,自动驾驶汽车也是可能的。
更多模块的细节可以在以后的博客中讨论