This should be refactored. WIP in plan
При работе с асинхроным кодом приходится писать следующее
class EchoServer : std::enable_shared_from_this<EchoServer> {
char buff[1024];
tcp::socket sock;
public:
EchoServer(tcp::socket sock) : sock(std::move(sock)) {}
void Start() {
read();
}
private:
void read() {
async_read(sock, buffer(buff), [self = shared_from_this()](auto ec, size_t read){
if (ec) {
//handle_error()
return; //cannot throw here
}
self->write(read);
});
}
void write(size_t amount) {
async_write(sock, buffer(buff, amount), [self = shared_from_this()](auto ec, size_t){
if (ec) {
//handle_error()
return; //cannot throw here
}
self->read();
});
}
};task<> tcp_echo_server(tcp::socket socket)
{
char data[1024];
while (true) {
auto n = co_await socket.async_read_some(buffer(data), use_awaitable);
co_await async_write(socket, buffer(data, n));
}
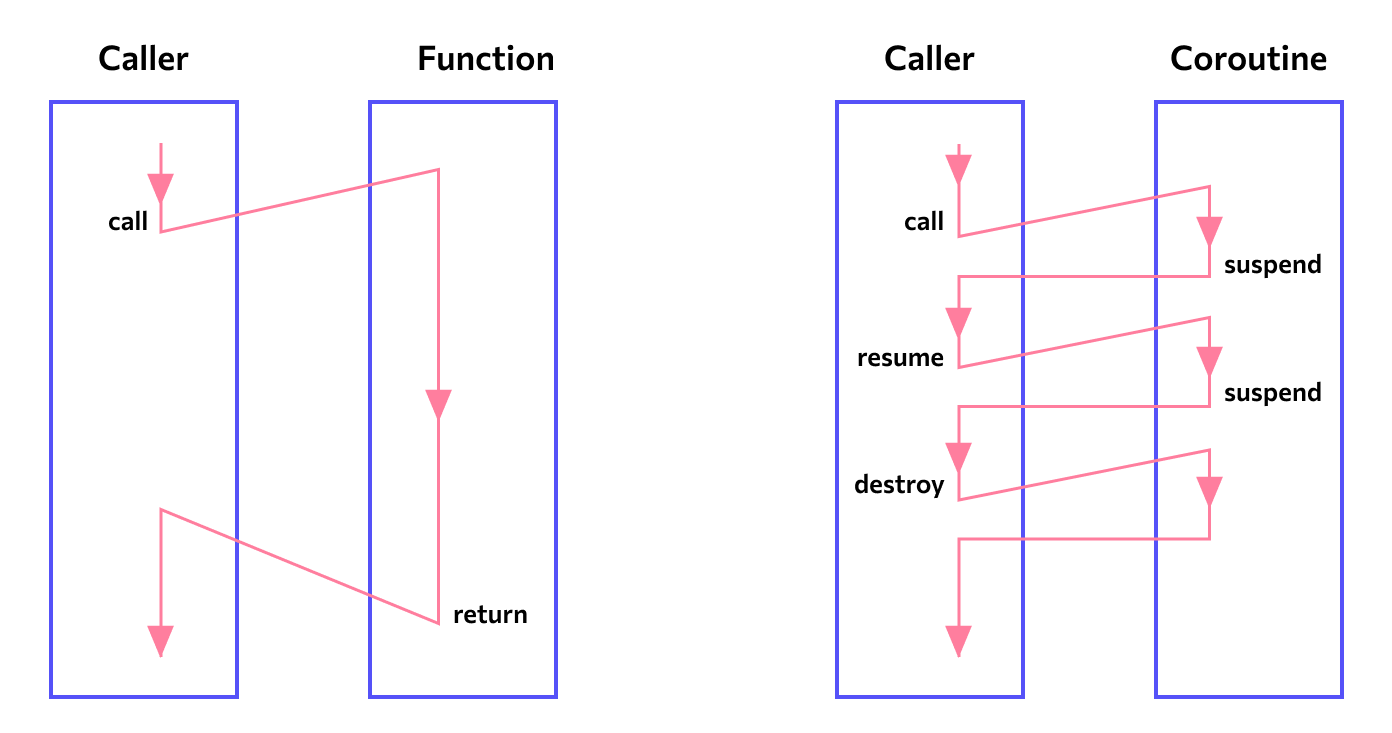
}Мелвин Эдвард Конвей - американский ученый-компьютерщик, программист и хакер, который придумал то, что сейчас известно как закон Конвея: "Организации, разрабатывающие системы, вынуждены создавать проекты, которые являются копиями коммуникационных структур этих организаций".
Помимо вышеперечисленного, Конвей, пожалуй, наиболее известен благодаря разработке концепции сопрограмм. Конвей ввел термин "сопрограмма" в 1958 году и был первым, кто применил эту концепцию. Позже он написал основополагающую статью на тему сопрограмм под названием "Design of a Separable Transition-diagram".
TODO: https://habrastorage.org/webt/1o/v4/-v/1ov4-vv40pxmehwic63rgzvr5qq.jpeg https://blog.skillfactory.ru/wp-content/uploads/2023/02/coroutine1-3919182.png
{kind=link}
{kind=link}
Стэкфул корутины очень похожи на потоки. Альтернативные нзвания: зеленые потоки, файберы
В отличии от потоков их конкурентность называется Кооперативной, так как они управляются не ядром, которое может забрать управление в любой момент (по прерыванию, Упреждающяя конкурентность), а обычно управляются Userspace планировщиком.
Также как и полноценные настоящие системные потоки они требуют от языка возможности сохранять контекст исполнения. Под стеком подразумеваются данные на стеке и регистры процессора.
Необязательно все на одном физическом потоке (M/N)
Приемущества:
- В использовании очень похои на обычные треды без спец синтаксиса
- Не требуют помощи компилятора
Недостатки:
- Дорогое переключение контекста
- Невозможность* роста стэка
Применения:
- Boost.Coroutine(2)
- Boost.Fiber
- Userver
- Golang
- Java virtual threads
- RTOS
TODO: картинки!
Стэклесс корутины в своем названии и описывают основное приемущество перед стэклесс. Сохранение точки исполнения делается с помощью чуть ли не одной цифры.
Преимущества:
- Меньшее использование памяти
- Не требует сохранения контекста
- Гибкость (генераторы)
Недостатки:
- Требуют помощи от компилятора
- Специальный синтаксис
- На практике разбитые аллокации могут быть менее эффективные, чем одним блоком под весь стэк
Применения:
- Python asyncio
- C++20
- TODO: more
TODO: картинки!
Чаще всего для индикации завершения операции используется callback функция.
Детали не так важны, передается ли некий void* data или используется полноценное стирание типов (как например std::function<>)
И такой код может вполне быть успешным полезным. Я сам считаю что это оптимальный вариант при написании чего то низкоуровневого. Но при написании именно бизнес-логики, а не инфраструктуры иногда удобней использовать модель async\await. Самые болезненные случаи будут рассмотрены дальше
Для того чтобы начать понимание того, как все таки использовать корутины, а также интегрировать чужие начнем с простого - создадим обертку для следующей функции.
Стандарт С++20 позволяет определить coroutine_type - объект, который являсь значением, возвращаемым из функции определеить ее как корутину.
Для этого обязательно:
- присутствие одного из ключевых слов:
co_await,co_return,co_yield. - наличие внутреннего типа
promise_type(или переопределениеstd::coroutine_traits) - возможность получить из
coroutine_type=>awaitable
coroutine<int> my_function() {
co_return 1; // co_yield / co_await
}template<typename T>
struct coroutine_type {
using promise_type = promise;
awaitable operator co_await(); // Либо сам является awaitable
}
template<>
struct std::coroutine_traits<coroutine> {
using promise_type = promise;
};Либо
struct promise_type {
coroutine_type get_return_object();
awaitable initial_suspend() noexcept;
awaitable final_suspend() noexcept;
// these can return awaitable themselves (TODO: check)
void return_value(T&& result) {} // Либо эта версия
void return_void() {} // Либо эта
void unhandled_exception() {} // вызывается внутри catch-блока.
}struct awaitable {
bool await_ready();
bool await_suspend();
T await_resume(); // may throw exceptions
};
struct std::coroutine_handle {
void resume();
void destroy();
bool done();
operator bool();
};Аля Redis
// ok == false => result contains exception msg
void run(string request, std::function<void(bool ok, string result)> cb);void doMultiStepTask(std::function<void(bool ok)> callback) {
run("GET key", [=](bool ok, string result){
if (!ok) {
handle_error(result);
return;
}
run("SET another", [=](bool ok, string result){
if (!ok) {
handle_error(result);
return;
}
});
});
}// half-Slideware ahead
#include <string>
#include <functional>
#include <coroutine>
#include <stdexcept>
#include <optional>
#include <concepts>
#include <memory>
using std::string;void run(string request, std::function<void(bool ok, string result)> cb);
void log(string msg);Цель - написать полностью имплементацию для:
task async_run(string request) ;Напишем наши корутины следующим образом: все состояние одной асинхронной транзакции будет общим
между promise (передающая сторона) и task (принимающая сторона)
struct state {
bool done = false;
std::exception_ptr exc;
string result;
std::coroutine_handle<> handle = {}; //type-erased
~state() {
if (handle) handle.destroy();
}
};Для начала мы напишем promise. Фактически handle для передачи принимающей стороне результата асинхронного вычисления
struct promise {
std::shared_ptr<state> s = std::make_shared<state>();
auto initial_suspend() {
return std::suspend_never{};
}
auto final_suspend() noexcept {
return std::suspend_never{};
}
auto get_return_object() {
return task{s};
}
void set_error(std::exception_ptr exc) {
s->exc = exc;
s->done = true;
if (s->handle) {
s->handle.resume();
}
}
auto unhandled_exception() {
set_error(std::current_exception());
}
void return_value(string result) {
s->result = std::move(result);
s->done = true;
if (s->handle) {
s->handle.resume();
}
}
};struct task {
std::shared_ptr<state> s;
using promise_type = promise;
bool await_ready() {
return s->done;
}
// Хэндл вызывающей стороны!
// Параметр шаблона может отличаться!
// Поэтому используем стертую версию
void await_suspend(std::coroutine_handle<> h) {
s->handle = h;
}
string await_resume() {
if (s->exc) {
std::rethrow_exception(s->exc);
} else {
return std::move(s->result);
}
}
};// Клей со старым кодом!
task async_run(string request) {
promise prom;
auto future = prom.get_return_object();
// Стоит обратить внимание, что promise_type у нас получился копируемым, что
// обычно делать не стоит!
run(request, [prom](auto ok, string result){
if (ok) {
prom.return_value(std::move(result));
} else {
prom.set_error(std::make_exception_ptr(std::runtime_error(std::move(result))));
}
});
return future;
}Ну и наконец!
task async_main() {
while (true) {
auto pong = co_await async_run("ping");
log(pong);
}
}Аналог на коллбеках
void async_main();
namespace detail {
void cb(bool ok, string result);
void cb(bool ok, string result) {
if (ok) {
log(result);
async_main();
}
}
} //detail
void async_main() {
run("ping", detail::cb);
}Можно чуть более кратко
void async_main() {
run("ping", [](bool ok, string result) {
if (ok) {
log(result);
async_main();
}
});
}typedef void(*Callback)(void* data, const char* responce, bool ok); // Нам даже не пожалели typedef!
void run(const char* request, Callback callback, void* data);
Теперь async_run будет выглядеть следующим образом
namespace detail {
struct Context {
promise prom;
};
inline void callback(void* data, const char* responce, bool ok) {
auto* ctx = static_cast<Context*>(data);
if (ok) {
ctx->prom(responce); // promise_type::set_value() should be noexcept
} else {
ctx->prom(std::make_exception_ptr(std::runtime_error(responce)));
}
delete ctx;
}
}task async_run(string const& request) {
promise prom;
auto future = prom.get_return_object();
run(request.c_str(), detail::callback, new Context{prom});
return future;
}Или так
task async_run(string const& request) {
promise prom;
auto future = prom.get_return_object();
auto ctx = new Context{prom};
auto status = run(request.c_str(), detail::callback, ctx);
if (status == MY_BAD_STATUS) {
ctx->prom.set_error(std::make_exception_ptr(std::runtime_error("bad status")));
delete ctx;
}
return future;
}// Примерная организация кадра сопрограммы.
// Здесь отражены наиболее важные для понимая части
// 1. resume - указатель на функцию,
// которая вызывается при передаче управления сопрограмме, описывает стейт-машину.
// 2. promise - объект типа Promise
// 3. state - текущее состояние
// 4. heap_allocated - был ли фрейм при создание размещен в куче
// или фрейм был создан на стеке вызывающей стороны
// 5. args - аргументы вызова сопрограммы
// 6. locals - сохраненные локальные переменные текущего состояния
// ...
struct coroutine_frame
{
void (*resume)(coroutine_frame *);
promise_type promise;
int16_t state;
bool heap_allocated;
// args
// locals
//...
};// 1. Создание и инициализация кадра сопрограммы. Инициация выполнения.
template<typename ReturnValue, typename ...Args>
ReturnValue Foo(Args&&... args)
{
// 1.
// Определяем тип Promise
using coroutine_traits = std::coroutine_traits<ReturnValue, Args...>;
using promise_type = typename coroutine_traits::promise_type;
// 2.
// Создание кадра сопрограммы.
// Размер кадра определяется встроенными средствами компилятора
// и зависит от размера объекта Promise, количества и размера локальных переменных
// и аргументов, и набора вспомогательных данных,
// необходимых для управления состоянием сопрограммы.
// 1. Если тип promise_type имеет статический метод
// get_return_object_on_allocation_failure,
// то вызывается версия оператора new, не генерирующая исключений
// и в случае неудачи вызывается метод get_return_object_on_allocation_failure,
// результат вызова возвращается вызывающей стороне.
// 2. Иначе вызывается обычная версия оператора new.
coroutine_frame* frame = nullptr;
if constexpr (has_static_get_return_object_on_allocation_failure_v<promise_type>)
{
frame = reinterpret_cast<coroutine_frame*>(
operator new(__builtin_coro_size(), std::nothrow));
if(!frame)
return promise_type::get_return_object_on_allocation_failure();
}
else
{
frame = reinterpret_cast<coroutine_frame*>(operator new(__builtin_coro_size()));
}
// 3.
// Сохраняем переданные функции аргументы во фрейме.
// Аргументы переданные по значению перемещаются.
// Аргументы переданные по ссылке (lvalue и rvalue) сохраняют ссылочную семантику.
<move-args-to-frame>
// 4.
// Создаем объект типа promise_type и сохраняем его во фрейме
new(&frame->promise) create_promise<promise_type>(<frame-lvalue-args>);
// 5.
// Вызываем метод Promise::get_return_object().
// Результат вычисления будет возвращен вызывающей стороне
// при достижение первой точки остановки и передачи потока управления.
// Результат сохраняется как локальная переменная до вызова тела функции,
// т.к. фрейм сопрограммы может быть удален (см. оператор co_await).
auto return_object = frame->promise.get_return_object();
// 6.
// Вызываем функцию описывающую стейт-машину согласно
// пользовательским запросам передачи управления
// В реализации GCC, например, эти две функции называются
// ramp-fucntion (создание и инициализация) и
// action-function (пользовательская стейт-машина) соответственно
void couroutine_states(coroutine_frame*);
couroutine_states(frame); //Первый вызов
// 7.
// Возвращаем результат вызывающей стороне,
// мы достигнем этой точки в коде только при первом вызове,
// все последующие запросы на возобновление работы будут вызывать функцию
// стейт-машины couroutine_states, указатель на функцию сохранен во фрейме сопрограммы.
return return_object;
}void couroutine_states(coroutine_frame* frame)
{
switch(frame->state)
{
case 0:
... goto resume_point_0;
case N:
goto resume_point_N;
...
}
co_await promise.initial_suspend();
try
{
// function body
}
catch(...)
{
promise.unhandled_exception();
}
final_suspend:
co_await promise.final_suspend();
}Not really
action()
.Then([]{
return nextStep();
})
.Then([]{
return lastStep();
});manual awaitable.await_ready()
using namespace std::chrono_literals;
void connect(T sock, T proxy) {
auto doConnect = [=]{
forward(sock, proxy);
forward(proxy, sock, true);
};
if (proxy->state() != Connected) {
WaitSignal(proxy, &QWebSocket::connected, sock, 5s)
.ThenSync(doConnect)
.CatchSync([](std::exception& e){
log("Achtung: {}!", e.what());
});
} else {
doConnect();
}
}Future<void> connect(QWebSocket* sock, QWebSocket* proxy) {
auto doConnect = [=]{
forward(sock, proxy);
forward(proxy, sock, true);
};
if (proxy->state() != Connected) {
co_await WaitSignal(proxy, &QWebSocket::connected, sock, 5s);
} else {
doConnect();
}
}Future<void> connect(QWebSocket* sock, QWebSocket* proxy) {
if (proxy->state() != Connected) {
co_await WaitSignal(proxy, &QWebSocket::connected, sock, 5s);
}
forward(sock, proxy);
forward(proxy, sock, true);
}Future<void> func(QWebSocket* ws) {
// ...
return WaitSignal(ws, &QWebSocket::connected, ws, 5000).ThenSync([=](auto ok){
if (!ok) {
logErr("Ws error in: {}", ws->objectName());
ws->deleteLater();
}
ok.get();
return fut::Resolved();
});
}Future<void> func(QWebSocket* ws) {
// ...
try {
co_await WaitSignal(ws, &QWebSocket::connected, ws, 5000);
} catch (...) {
logErr("Ws error in: {}", ws->objectName());
ws->deleteLater();
throw;
}
}Session sess; //move-only type
//...
return WaitSignal(d->ws, &QWebSocket::connected)
.ThenSync([???]{
return sess->init();
})
.ThenSync([???](Session result){
return sess->handle(result);
})
.ThenSync([???]() mutable {
return sess;
});Session sess;
//...
co_await WaitSignal(sess.d->ws, &QWebSocket::connected);
auto result = co_await sess.init();
co_await sess.handle(result);
co_return sess; //auto moveFuture<void> FileSystemCache::Cleanup() {
Dirs dirs = collectDirs() while(!dirs.empty()) {
auto level = popOneLevel(dirs);
co_await Gather(level);
}
}
Future<void> FileSystemCache::Cleanup() try {
Dirs dirs = collectDirs()
if (!dirs.empty()) {
return populateCleanups(params, dirs);
} else {
return fut::Resolved();
}
} catch (...) {
return fut::Rejected<void>(std::current_exception());
}static Future<void> populateCleanups(Dirs& dirs) {
auto level = popOneLevel(dirs);
return Gather(level)
.Then([dirs = std::move(dirs)]() mutable {
if (dirs.empty()) {
// Приходится костылить, чтобы совпадал возвращаемый тип
return fut::Resolved();
} else {
return populateCleanups(params, dirs);
}
});
}// Не нужно оборачивать в try-catch!
Future<void> FileSystemCache::Cleanup(const cache::CleanupParams ¶ms){
Dirs dirs;
auto iter = std::filesystem::recursive_directory_iterator(cacheDir);
auto end = std::filesystem::recursive_directory_iterator();
for (;iter != end; ++iter) {
if (iter->is_directory()) {
size_t depth = size_t(iter.depth());
if (dirs.size() <= depth) {
dirs.resize(depth + 1);
}
dirs[depth].push_back(Path(iter->path()));
}
}
for (auto it = dirs.rbegin(); it != dirs.rend(); ++it) {
std::vector<Future<void>> levelFuts;
for (auto& dir: level) {
levelFuts.push_back(doCleanup(params, dir));
co_await Gather(levelFuts);
}
}
}// assuming that task is some coroutine task type
task<void> f() {
// not a coroutine, undefined behavior
}
task<void> g() {
co_return; // OK
}
task<void> h() {
co_await g();
// OK, implicit co_return;
}// Bad!!!
task coro(const std::vector<int>& data)
{
co_await sleep(10s);
// data is dangling here
for(const auto& value : data)
std::cout << value << std::endl;
}// OK!
task coro(const std::vector<int>& _data)
{
auto data = _data;
co_await sleep(10s);
for(const auto& value : data)
std::cout << value << std::endl;
}Но подобные проблемы легко найти и исправить. Их последствия проявляются практически сразу и очевидно.
Настоящие проблемы с корутинами могут возникнуть в изза слабой связанности вызываемого асинхронного кода и
вызывающей стороны (связаны они только через coroutine_type и awaitable, который он порождает).
task<void> some_func();
struct Action {
Action(string data);
task<void> run() {
// ok
co_await some_func();
// is Action alive here? Who can tell...
}
};
Поэтому нашему классу task<T> понадобится некий способ остановить исполнения и не вызываеть handle.resume().
И это мы еще не синхронизируем взаимодействие между потоков. Корутины чисто в одном потоке уже удобны
Связано с прошлым пунктом.
struct Worker : std::enable_shared_from_this<Worker> {
void run() {
longTask([self = weak_from_this()]{ //shared_from_this
if (auto worker = self.lock()) {
worker->onDone();
}
});
}
void onDone() {
//...
}
}void job(Callback callback) {
std::thread thread([=]{
auto result = longTask();
callback(result);
});
thread.detach();
}Пример для куобъектов
class QObjExecutor final : public fut::Executor
{
QPointer<QObject> context;
public:
QObjExecutor(QObject* ctx) :
ctx(context)
{}
void Execute(Job job) noexcept override {
auto ctx = context.data();
if (!ctx) {
return;
}
if (QThread::currentThread() != ctx->thread()) {
QMetaObject::invokeMethod(ctx, job, Qt::QueuedConnection);
} else {
job();
}
}
};Пример применения await_transform
folly::coro::Task<int> task42Slow() {
// This doesn't suspend the coroutine, just extracts the Executor*
folly::Executor* startExecutor = co_await folly::coro::co_current_executor;
co_await folly::futures::sleep(std::chrono::seconds{1});
folly::Executor* resumeExecutor = co_await folly::coro::co_current_executor;
CHECK_EQ(startExecutor, resumeExecutor);
}//...
template <typename Awaitable>
auto await_transform(NothrowAwaitable<Awaitable>&& awaitable) {
bypassExceptionThrowing_ = BypassExceptionThrowing::REQUESTED;
return await_transform(awaitable.unwrap());
}
auto await_transform(folly::coro::co_current_executor_t) noexcept {
return ready_awaitable<folly::Executor*>{executor_.get()};
}Универсальный способ, если мы не управляем кодом promise. Минус - оверхед от suspend
struct co_get_handle
{
std::coroutine_handle<> _handle;
bool await_ready() const noexcept { return false; } //sleep
bool await_suspend(std::coroutine_handle<> handle) noexcept { _handle = handle; return false; } //get handle and continue
std::coroutine_handle<> await_resume() noexcept { return _handle; }
};inline void callback(void* data, const char* responce, bool ok) {
auto* ctx = static_cast<Context*>(data);
if (ok) {
ctx->prom(responce); // promise_type::set_value() should be noexcept
} else {
ctx->prom(std::make_exception_ptr(std::runtime_error(responce)));
}
delete ctx;
}
task async_run(string const& request) {
auto self = co_await co_get_handle();
auto future = prom.get_return_object();
run(request.c_str(), detail::callback, new Context{prom});
co_return future;
}struct coroutine_frame // <-- pointer*
{
void (*resume)(coroutine_frame *);
promise_type promise; // <-- promise
int16_t state;
bool heap_allocated;
// args
// locals
//...
};Универсальный способ, если мы не управляем кодом promise. Минус - оверхед от suspend
struct co_get_handle {};
struct give : std::suspend_never {
handle handle;
handle await_resume() {
return handle;
}
};
struct promise
{
// ...
using handle = std::couroutine_handle<promise>;
// must return awaitable
give await_transform(co_get_handle) {
return {handle::from_promise(*this)};
}
};
// ACHTUNG: https://stackoverflow.com/questions/76110225/why-is-promise-typeawait-transform-greedyinline void callback(void* data, const char* responce, bool ok) {
auto self = std::coroutine_handle<task::promise_type>::from_pointer(data);
auto& prom = self.promise();
if (ok) {
prom(responce);
} else {
prom(std::make_exception_ptr(std::runtime_error(responce)));
}
}
task async_run(string const& request) {
auto self = co_await co_get_handle();
run(request.c_str(), detail::callback, self.pointer());
}Глобальные настройи для вкелючения корутин
if ("${CMAKE_CXX_COMPILER_ID}" MATCHES "Clang")
set(CMAKE_CXX_STANDARD 20)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -fcoroutines-ts")
elseif ("${CMAKE_CXX_COMPILER_ID}" STREQUAL "GNU")
set(CMAKE_CXX_STANDARD 20)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -fcoroutines")
elseif ("${CMAKE_CXX_COMPILER_ID}" STREQUAL "MSVC")
set(CMAKE_CXX_STANDARD 20)
endif()- Хочу корутины
- astra 1.7 target...
- look inside
- gcc8
- sad.png
- clang14 (TODO: check)
- ща все врубим
- libstdc++ от gcc8
- sad2.png
- dual-stdlibs in project moment
- asio!
- folly?
- qcoro!
- https://github.com/andreasbuhr/cppcoro!?