Please refer to Official enhanced GPU tensor reconstruction system Link for O3D docs
A standalone portable 3D reconstruction system with Intel realsense and Jetson Nano

- Standalone 3D reconstruction system
- Instant 3D reconstruction
- Metrically accurate
- Low power consuming
- Offline and online (both)
- Cost effective
- Modular approach
- Deep learning integration (3D deep learning for registration)
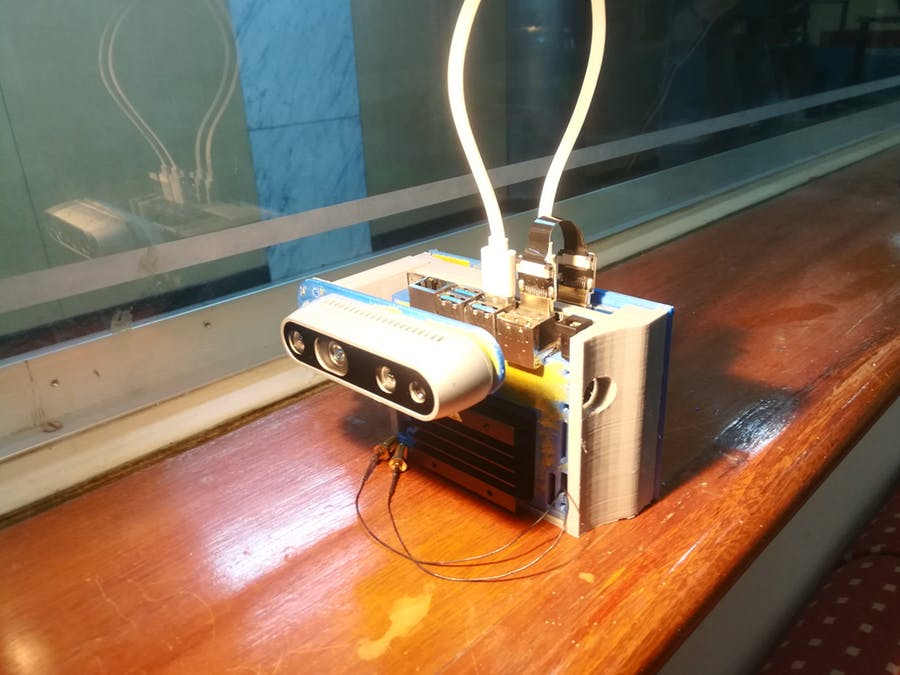
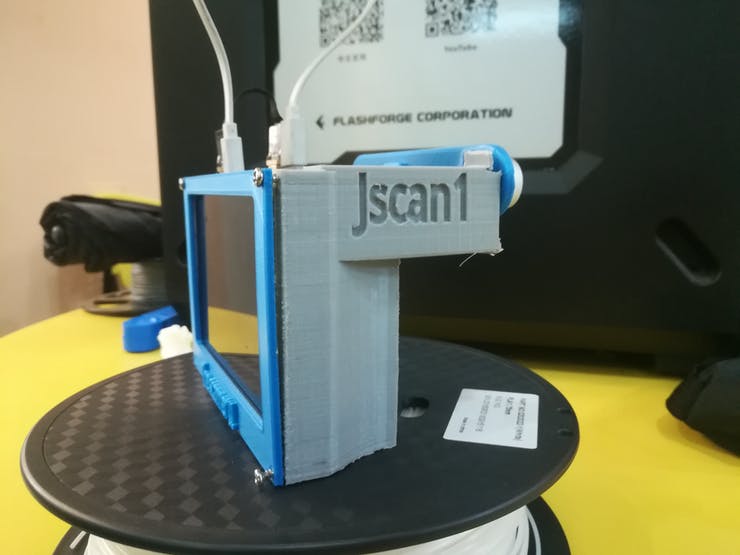
Hardware built:

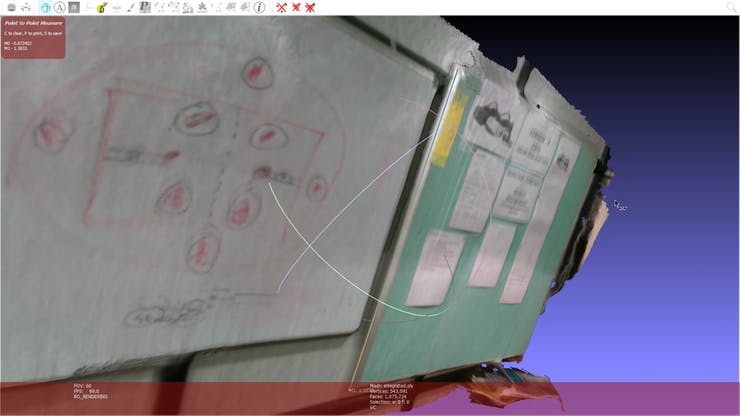
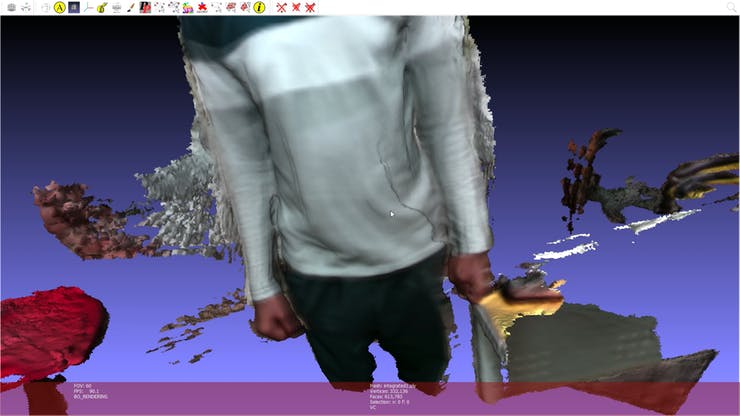
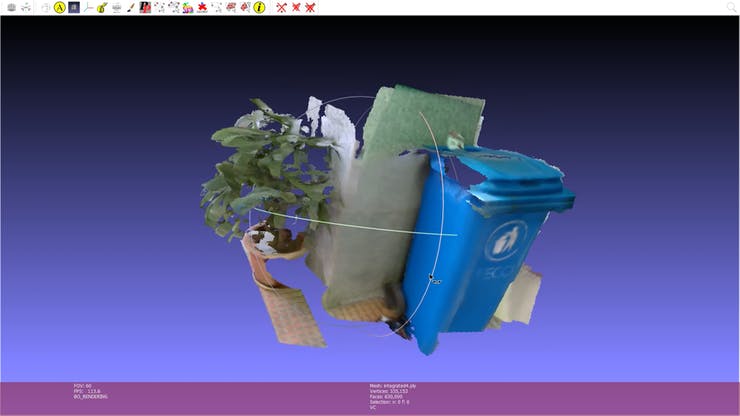
Reconstructed results:
Jetscan is a portable 3D dense reconstruction system based on
- Jetson nano by NVIDIA
- Intel Realsense D400 series depth camera
- Open3D by INTEL ISL
- theNded's CUDA implementation

-
For setting up the software stack, follow instructions in
Sofware_O3D - Software setup
-
Complete software repo is here (forked from Open3D)
https://github.com/devshank3/Open3D-for-Jetson
its built on theNded's CUDA implementation
Follow instructions in
-
Hardware_electronics - Electronics setup
-
Hardware_casing - Case/Closure setup
Follow https://github.com/devshank3/JetScan/blob/master/Software_O3D/README.md for Software Setup
-
Step 1 : Go to Open3D-for-Jetson/Reconstruction_Jetscan_Hybrid/
-
Step 2 : Edit Main_gui.py
set your system executable path to Run_MakeFragments,ViewPoseGraph,Run_IntegrateScene
eg.
os.system('/home/shank/Projects/3D_processing/jetscan/jetscan-final-edit/Open3D-for-Jetson/build/bin/examples/./Run_MakeFragments') ⇩⇩⇩ to ⇩⇩⇩ os.system('your_system _path/Open3D-for-Jetson/build/bin/examples/./Run_MakeFragments') -
Step 3: Run the UI (in virtual env if setup)
$ python3 Main_gui.py
-
Step 4 : Start the Reconstruction
Capture RGB-D
Captures the RGB-D sequence
Reconstruct Scene
The hybrid reconstruction system starts with the RGB-D sequence recorded
View
View the latest reconstructed 3D Model
If interested pls contact me @ devshank3@gmail.com
Under the MIT License (MIT)
Copyright (c) 2020 Shankar Hariharan (aka devshank3)