
This repository contains the software the implements the Behavior Trees framework used in the SARAFun EU project. It relies on a modified version of the ROS-Behavior-Tree package by Michele Colledanchise, which adds support for using the action and condition templates as libraties (found here).
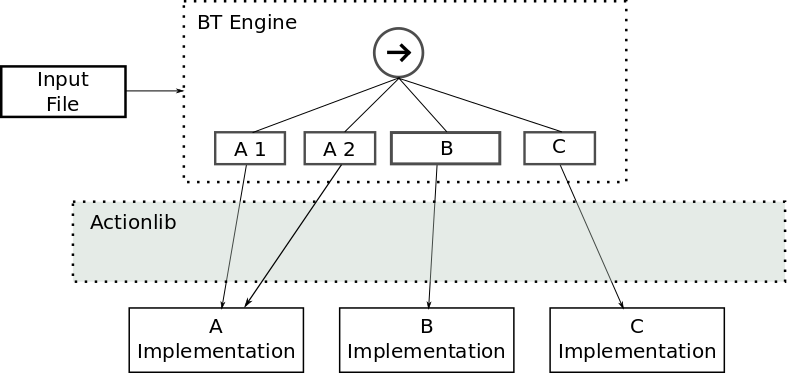
The framework wraps the ROS-Behavior-Tree package (dubbed 'the engine') in order to allow generating behavior trees from input files. It also decouples the action implementations from the tree structure, by assuming that all the system actions are implemented as actionlib servers. From the action definitions, the framework initialized BT actions as actionlib clients which, once tick'ed, will send a proper actionlib goal to the server implementing the action.
Additionally, a generator package allows for trees to be generated through the aggregation of pre-defined subtrees, representing a high level task. Given a list of tasks to be executed, the package generates a tree description connecting the actions that implement each task.
There is an issue with gcc 4.8 that prevents compiling the json parser used in this project. So first, make sure you have a more recent version of gcc. In ubuntu this can be achieved by doing
$ sudo add-apt-repository ppa:ubuntu-toolchain-r/test
$ sudo apt-get update
$ sudo apt-get install gcc-4.9 g++-4.9
and your system should now be correctly configured.
The provided packages depend on yaml-cpp.
The framework currently depends on the sarafun_msgs package in order to use its tree generator. You can get a reduced version of the package here.
If you do not have a catkin workspace, create one by doing
$ mkdir ~/catkin_ws
$ mkdir ~/catkin_ws/src
$ cd ~/catkin_ws
$ catkin_make
Otherwise skip this step. Go to the src folder of your catkin workspace and introduce the following commands
$ wstool init
$ wstool merge https://raw.githubusercontent.com/diogoalmeida/sarafun_bt/master/.rosinstall
$ wstool update
This will download the required packages for running the framework. Compile the packages by doing $ catkin_make -DCMAKE_CXX_COMPILER=/usr/bin/g++-4.9 install at the root of your workspace. After compiling, do not forget to source the workspace:
$ source devel/setup.bash
These packages depend on yaml-cpp, version 0.5.3, which can be obtained here
The tree client provides services to start, stop and restart a tree. When starting, the tree client will parse the input file and generate a tree based on it. Restarting a tree stops the currently running tree, parses the input file and generates a new one based on it. The provided services are:
/sarafun/start_tree/sarafun/stop_tree/sarafun/restart_tree
The start service requires a file path to be given. This will be used by the json parser to load the appropriate tree.
This package provides two demos:
- The first demo is used to illustrate the BT functionality. It runs the tree defined in
sarafun_tree/data/example_demo1.json, and each action will prompt the user to enter the key "p" for preempting the action, "a" to abort it and anything else to succeed. Preempting or aborting an action results in aFAILUREstate in the behavior tree. Edit thesarafun_tree/data/example_demo1.jsonfile in order to test different tree configurations! To run this demo, type
$ roslaunch sarafun_tree run_sarafun_bt_demo.launch demo1:=true
The behavior tree package takes a json file as input in order to generate the tree. The file is located in sarafun_tree/data and its name is given by the ROS parameter /sarafun/bt/file. If the parameter is not set, it will use the default name example.json.
The file defines the tree by specifying its root and a list of nodes. A node can be a flow control node or a leaf node. It is defined by its id, type and name tags and, for the flow control nodes only, by a list of children (children) which contains the ids of the children nodes.
The id tag should be unique, and it is used to refer to a particular instance of the behavior tree node. type determines the what is the node functionality (see below). Finally, the name tag is currently only used by the leaf nodes. It specifies the actionlib server name that the concrete action implementation uses and it is used by the behavior tree in order to call the server.
A simple example is as follows
{
"root": "sequence1",
"nodes": {
"sequence1": {
"id": "sequence1",
"type": "SequenceStar",
"name": "SequenceStar",
"children": [
"action1",
"selector1"
]
},
"selector1": {
"id": "selector1",
"type": "Selector",
"name": "Selector",
"children": [
"action2",
"action3"
]
},
"action1": {
"id": "action1",
"type": "Action",
"name": "action_1"
},
"action2": {
"id": "action2",
"type": "Action",
"name": "action_2"
},
"action3": {
"id": "action3",
"type": "Action",
"name": "action_3"
}
}
}There are four currently supported flow control nodes and two possible leaf node types, which are defined in the json file by the type property:
- Sequence: The sequence node ticks its children sequentially every time it receives a tick from its parent node. Returns
FAILUREas soon as one of its children returnsFAILURE, orSUCCESSin case all of its children are successful - Selector: The selector node ticks its children sequentially every time it receives a tick from its parent node. Returns
SUCCESSas soon as one of its children returnsSUCCESS, orFAILUREin case all of its children are successful - SequenceStar: The same as Sequence, but with memory, that is, every time it receives a tick from its parent, it will skip tick'ing all the children that previously returned
SUCCESS - SelectorStar: The same as Selector, but with memory, that is, every time it receives a tick from its parent, it will skip tick'ing all the children that previously returned
FAILURE - Action: An action will execute some well defined program when it is tick'ed, and will return
SUCCESSorFAILUREat the end of its execution, according to the implementation. While executing, it will returnRUNNING - Condition: A condition is similar to an action, but it is meant to return
SUCCESSorFAILUREas soon as it tick'ed, and should be used to help the behavior tree logic by verifying some condition.
The BT engine provides a basic openGL tree visualization. An arbitrary tree may not be rendered adequately, in which case the user can use the keyboard to ajust the tree:
- The directional arrows on the keyboard will translate the tree on the visualization window;
- Page up will zoom the tree in, page down will zoom out.