diff --git a/.github/workflows/ci.yml b/.github/workflows/ci.yml
index 1a8d18c..66427cd 100644
--- a/.github/workflows/ci.yml
+++ b/.github/workflows/ci.yml
@@ -48,9 +48,7 @@ jobs:
run: |
python -m unittest
- - name: Test scripts
- env:
- ROBOFLOW_TOKEN: ${{ secrets.ROBOFLOW_API_KEY }}
+ - name: Test yolov5 train
shell: bash # for Windows compatibility
run: |
pip install -e .
@@ -66,34 +64,57 @@ jobs:
python yolov5/train.py --img 128 --batch 16 --weights yolov5/weights/yolov5n.pt --epochs 1 --device cpu
yolov5 train --img 128 --batch 16 --weights yolov5/weights/yolov5n.pt --epochs 1 --device cpu --freeze 10
yolov5 train --img 128 --batch 16 --weights yolov5/weights/yolov5n.pt --epochs 1 --device cpu --evolve 2
- # detect
+
+ - name: Test yolov5 detect
+ shell: bash # for Windows compatibility
+ run: |
python yolov5/detect.py --weights yolov5/weights/yolov5n.pt --device cpu
yolov5 detect --weights yolov5/weights/yolov5n.pt --device cpu
python yolov5/detect.py --weights runs/train/exp/weights/last.pt --device cpu
yolov5 detect --weights runs/train/exp/weights/last.pt --device cpu
- # val
+
+ - name: Test yolov5 val
+ shell: bash # for Windows compatibility
+ run: |
python yolov5/val.py --img 128 --batch 16 --weights yolov5/weights/yolov5n.pt --device cpu
yolov5 val --data yolov5/data/coco128.yaml --img 128 --batch 16 --weights yolov5/weights/yolov5n.pt --device cpu
python yolov5/val.py --img 128 --batch 16 --weights runs/train/exp/weights/last.pt --device cpu
yolov5 val --data yolov5/data/coco128.yaml --img 128 --batch 16 --weights runs/train/exp/weights/last.pt --device cpu
- # export
+
+ - name: Test yolov5 export
+ shell: bash # for Windows compatibility
+ run: |
pip install onnx onnx-simplifier tensorflowjs
python yolov5/export.py --weights yolov5/weights/yolov5n.pt --device cpu --include torchscript,onnx,tflite
yolov5 export --weights yolov5/weights/yolov5n.pt --device cpu --simplify --include torchscript,onnx,saved_model,pb,tfjs
- # benckmarks
+
+ - name: Test yolov5 benchmarks
+ shell: bash # for Windows compatibility
+ run: |
yolov5 benchmarks --weights yolov5n.pt --img 128 --pt-only --device cpu
- # classify
+
+ - name: Test yolov5 classify
+ shell: bash # for Windows compatibility
+ run: |
yolov5 classify train --img 128 --data mnist2560 --model yolov5n-cls.pt --epochs 1 --device cpu
yolov5 classify train --img 128 --data mnist2560 --model fcakyon/yolov5n-cls-v7.0 --epochs 1 --device cpu
yolov5 classify val --img 128 --data datasets/mnist2560 --weights yolov5n-cls.pt --device cpu
yolov5 classify predict --img 128 --weights yolov5n-cls.pt --device cpu
- # segment
+
+ - name: Test yolov5 segment
+ shell: bash # for Windows compatibility
+ run: |
yolov5 segment train --img 128 --weights yolov5n-seg.pt --epochs 1 --device cpu
yolov5 segment train --img 128 --weights fcakyon/yolov5n-seg-v7.0 --epochs 1 --device cpu
# yolov5 segment val --img 128 --weights yolov5n-seg.pt --device cpu
yolov5 segment predict --img 128 --weights yolov5n-seg.pt --device cpu
- # roboflow
- yolov5 train --data https://universe.roboflow.com/jacob-solawetz/aerial-maritime/dataset/10 --weights yolov5/weights/yolov5n.pt --device cpu --roboflow_token ${{ env.ROBOFLOW_TOKEN }}
- yolov5 classify train --data https://universe.roboflow.com/bagas-etcfr/flowerdata1/dataset/1 --img 128 --model yolov5n-cls.pt --epochs 1 --device cpu --roboflow_token ${{ env.ROBOFLOW_TOKEN }}
- yolov5 segment train --data https://universe.roboflow.com/scaffolding/scaffolding-distance/dataset/2 --img 128 --weights yolov5n-seg.pt --epochs 1 --device cpu --roboflow_token ${{ env.ROBOFLOW_TOKEN }}
+
+ - name: Test roboflow train
+ shell: bash # for Windows compatibility
+ env:
+ ROBOFLOW_TOKEN: ${{ secrets.ROBOFLOW_API_KEY }}
+ run: |
+ yolov5 train --data https://universe.roboflow.com/gdit/aerial-airport/dataset/1 --weights yolov5/weights/yolov5n.pt --img 128 --epochs 1 --device cpu --roboflow_token ${{ env.ROBOFLOW_TOKEN }}
+ # yolov5 classify train --data https://universe.roboflow.com/carlos-gabriel-da-silva-machado-siwvs/turtles-i1tlr/dataset/1 --img 128 --model yolov5n-cls.pt --epochs 1 --device cpu --roboflow_token ${{ env.ROBOFLOW_TOKEN }}
+ yolov5 segment train --data https://universe.roboflow.com/aymane-outani-auooc/cable-fzjik/dataset/2 --img 128 --weights yolov5n-seg.pt --epochs 1 --device cpu --roboflow_token ${{ env.ROBOFLOW_TOKEN }}
diff --git a/.github/workflows/package_testing.yml b/.github/workflows/package_testing.yml
index 3b0e345..bd6261a 100644
--- a/.github/workflows/package_testing.yml
+++ b/.github/workflows/package_testing.yml
@@ -46,9 +46,9 @@ jobs:
run: |
python -m unittest
- - name: Test scripts
+ - name: Test yolov5 train
+ shell: bash # for Windows compatibility
run: |
- pip install -e .
# donwload coco formatted testing data
python tests/download_test_coco_dataset.py
# train (dl base model from hf hub)
@@ -61,29 +61,49 @@ jobs:
python yolov5/train.py --img 128 --batch 16 --weights yolov5/weights/yolov5n.pt --epochs 1 --device cpu
yolov5 train --img 128 --batch 16 --weights yolov5/weights/yolov5n.pt --epochs 1 --device cpu --freeze 10
yolov5 train --img 128 --batch 16 --weights yolov5/weights/yolov5n.pt --epochs 1 --device cpu --evolve 2
- # detect
+ - name: Test yolov5 detect
+ shell: bash # for Windows compatibility
+ run: |
python yolov5/detect.py --weights yolov5/weights/yolov5n.pt --device cpu
yolov5 detect --weights yolov5/weights/yolov5n.pt --device cpu
python yolov5/detect.py --weights runs/train/exp/weights/last.pt --device cpu
yolov5 detect --weights runs/train/exp/weights/last.pt --device cpu
- # val
+ - name: Test yolov5 val
+ shell: bash # for Windows compatibility
+ run: |
python yolov5/val.py --img 128 --batch 16 --weights yolov5/weights/yolov5n.pt --device cpu
yolov5 val --data yolov5/data/coco128.yaml --img 128 --batch 16 --weights yolov5/weights/yolov5n.pt --device cpu
python yolov5/val.py --img 128 --batch 16 --weights runs/train/exp/weights/last.pt --device cpu
yolov5 val --data yolov5/data/coco128.yaml --img 128 --batch 16 --weights runs/train/exp/weights/last.pt --device cpu
- # export
+ - name: Test yolov5 export
+ shell: bash # for Windows compatibility
+ run: |
pip install onnx onnx-simplifier tensorflowjs
python yolov5/export.py --weights yolov5/weights/yolov5n.pt --device cpu --include torchscript,onnx,tflite
yolov5 export --weights yolov5/weights/yolov5n.pt --device cpu --simplify --include torchscript,onnx,saved_model,pb,tfjs
- # benckmarks
+ - name: Test yolov5 benchmarks
+ shell: bash # for Windows compatibility
+ run: |
yolov5 benchmarks --weights yolov5n.pt --img 128 --pt-only --device cpu
- # classify
+ - name: Test yolov5 classify
+ shell: bash # for Windows compatibility
+ run: |
yolov5 classify train --img 128 --data mnist2560 --model yolov5n-cls.pt --epochs 1 --device cpu
yolov5 classify train --img 128 --data mnist2560 --model fcakyon/yolov5n-cls-v7.0 --epochs 1 --device cpu
yolov5 classify val --img 128 --data datasets/mnist2560 --weights yolov5n-cls.pt --device cpu
yolov5 classify predict --img 128 --weights yolov5n-cls.pt --device cpu
- # segment
+ - name: Test yolov5 segment
+ shell: bash # for Windows compatibility
+ run: |
yolov5 segment train --img 128 --weights yolov5n-seg.pt --epochs 1 --device cpu
yolov5 segment train --img 128 --weights fcakyon/yolov5n-seg-v7.0 --epochs 1 --device cpu
# yolov5 segment val --img 128 --weights yolov5n-seg.pt --device cpu
yolov5 segment predict --img 128 --weights yolov5n-seg.pt --device cpu
+ - name: Test roboflow train
+ shell: bash # for Windows compatibility
+ env:
+ ROBOFLOW_TOKEN: ${{ secrets.ROBOFLOW_API_KEY }}
+ run: |
+ yolov5 train --data https://universe.roboflow.com/gdit/aerial-airport/dataset/1 --weights yolov5/weights/yolov5n.pt --img 128 --epochs 1 --device cpu --roboflow_token ${{ env.ROBOFLOW_TOKEN }}
+ # yolov5 classify train --data https://universe.roboflow.com/carlos-gabriel-da-silva-machado-siwvs/turtles-i1tlr/dataset/1 --img 128 --model yolov5n-cls.pt --epochs 1 --device cpu --roboflow_token ${{ env.ROBOFLOW_TOKEN }}
+ yolov5 segment train --data https://universe.roboflow.com/aymane-outani-auooc/cable-fzjik/dataset/2 --img 128 --weights yolov5n-seg.pt --epochs 1 --device cpu --roboflow_token ${{ env.ROBOFLOW_TOKEN }}
diff --git a/README.md b/README.md
index 866f615..e9b4070 100644
--- a/README.md
+++ b/README.md
@@ -25,7 +25,7 @@ You can finally install YOLOv5 o
-This yolov5 package contains everything from ultralytics/yolov5 at this commit plus:
+This yolov5 package contains everything from ultralytics/yolov5 at this commit plus:
1. Easy installation via pip: pip install yolov5
diff --git a/requirements.txt b/requirements.txt
index 4af966e..7d32a73 100644
--- a/requirements.txt
+++ b/requirements.txt
@@ -1,4 +1,4 @@
-# YOLOv5 🚀 requirements
+# YOLOv5 requirements
# Usage: pip install -r requirements.txt
# Base ------------------------------------------------------------------------
@@ -29,7 +29,7 @@ seaborn>=0.11.0
# Export ----------------------------------------------------------------------
# coremltools>=6.0 # CoreML export
-# onnx>=1.9.0 # ONNX export
+# onnx>=1.12.0 # ONNX export
# onnx-simplifier>=0.4.1 # ONNX simplifier
# nvidia-pyindex # TensorRT export
# nvidia-tensorrt # TensorRT export
@@ -44,7 +44,7 @@ seaborn>=0.11.0
# Extras ----------------------------------------------------------------------
# mss # screenshots
# albumentations>=1.0.3
-# pycocotools>=2.0 # COCO mAP
+# pycocotools>=2.0.6 # COCO mAP
# roboflow>=0.2.27
# ultralytics # HUB https://hub.ultralytics.com
@@ -55,4 +55,4 @@ boto3>=1.19.1
# coco to yolov5 conversion
sahi>=0.11.10
# huggingface
-huggingface-hub>=0.11.1
+huggingface-hub>=0.12.0
diff --git a/yolov5/__init__.py b/yolov5/__init__.py
index ce6190f..ccf565d 100644
--- a/yolov5/__init__.py
+++ b/yolov5/__init__.py
@@ -1,4 +1,4 @@
from yolov5.helpers import YOLOv5
from yolov5.helpers import load_model as load
-__version__ = "7.0.7"
+__version__ = "7.0.8"
diff --git a/yolov5/classify/predict.py b/yolov5/classify/predict.py
index 8feafe6..dc9dc7c 100644
--- a/yolov5/classify/predict.py
+++ b/yolov5/classify/predict.py
@@ -213,7 +213,7 @@ def parse_opt():
parser.add_argument('--augment', action='store_true', help='augmented inference')
parser.add_argument('--visualize', action='store_true', help='visualize features')
parser.add_argument('--update', action='store_true', help='update all models')
- parser.add_argument('--project', default=ROOT / 'runs/predict-cls', help='save results to project/name')
+ parser.add_argument('--project', default='runs/predict-cls', help='save results to project/name')
parser.add_argument('--name', default='exp', help='save results to project/name')
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
@@ -227,7 +227,7 @@ def parse_opt():
def main():
opt = parse_opt()
- #check_requirements(exclude=('tensorboard', 'thop'))
+ check_requirements(exclude=('tensorboard', 'thop'))
run(**vars(opt))
diff --git a/yolov5/classify/train.py b/yolov5/classify/train.py
index bd2c6ad..c011c1c 100644
--- a/yolov5/classify/train.py
+++ b/yolov5/classify/train.py
@@ -6,7 +6,7 @@
$ python classify/train.py --model yolov5s-cls.pt --data imagenette160 --epochs 5 --img 224
Usage - Multi-GPU DDP training:
- $ python -m torch.distributed.run --nproc_per_node 4 --master_port 1 classify/train.py --model yolov5s-cls.pt --data imagenet --epochs 5 --img 224 --device 0,1,2,3
+ $ python -m torch.distributed.run --nproc_per_node 4 --master_port 2022 classify/train.py --model yolov5s-cls.pt --data imagenet --epochs 5 --img 224 --device 0,1,2,3
Datasets: --data mnist, fashion-mnist, cifar10, cifar100, imagenette, imagewoof, imagenet, or 'path/to/data'
YOLOv5-cls models: --model yolov5n-cls.pt, yolov5s-cls.pt, yolov5m-cls.pt, yolov5l-cls.pt, yolov5x-cls.pt
@@ -30,7 +30,7 @@
from torch.cuda import amp
from tqdm import tqdm
-from yolov5.utils.downloads import attempt_donwload_from_hub
+from yolov5.utils.downloads import attempt_download_from_hub
from yolov5.utils.roboflow import check_dataset_roboflow
FILE = Path(__file__).resolve()
@@ -43,18 +43,12 @@
from yolov5.models.experimental import attempt_load
from yolov5.models.yolo import ClassificationModel, DetectionModel
from yolov5.utils.dataloaders import create_classification_dataloader
-from yolov5.utils.general import (DATASETS_DIR, LOGGER, TQDM_BAR_FORMAT,
- WorkingDirectory, check_git_info,
- check_git_status, check_requirements,
- colorstr, download, increment_path,
- init_seeds, print_args, yaml_save)
+from yolov5.utils.general import (DATASETS_DIR, LOGGER, TQDM_BAR_FORMAT, WorkingDirectory, check_git_info, check_git_status,
+ check_requirements, colorstr, download, increment_path, init_seeds, print_args, yaml_save)
from yolov5.utils.loggers import GenericLogger
from yolov5.utils.plots import imshow_cls
-from yolov5.utils.torch_utils import (ModelEMA, model_info,
- reshape_classifier_output, select_device,
- smart_DDP, smart_optimizer,
- smartCrossEntropyLoss,
- torch_distributed_zero_first)
+from yolov5.utils.torch_utils import (ModelEMA, model_info, reshape_classifier_output, select_device, smart_DDP,
+ smart_optimizer, smartCrossEntropyLoss, torch_distributed_zero_first)
LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
RANK = int(os.getenv('RANK', -1))
@@ -116,7 +110,7 @@ def train(opt, device):
# Model
# try to download from hf hub
- result = attempt_donwload_from_hub(opt.model, hf_token=None)
+ result = attempt_download_from_hub(opt.model, hf_token=None)
if result is not None:
opt.model = result
with torch_distributed_zero_first(LOCAL_RANK), WorkingDirectory(ROOT):
@@ -266,7 +260,7 @@ def train(opt, device):
f"\nPredict: yolov5 classify predict --weights {best} --source im.jpg"
f"\nValidate: yolov5 classify val --weights {best} --data {data_dir}"
f"\nExport: yolov5 export --weights {best} --include onnx"
- f"\nPyPi: model = yolov5.load('custom.pt')"
+ f"\nPython: model = yolov5.load('{best}')"
f"\nVisualize: https://netron.app\n")
# Plot examples
diff --git a/yolov5/classify/val.py b/yolov5/classify/val.py
index b31309b..7a0a23e 100644
--- a/yolov5/classify/val.py
+++ b/yolov5/classify/val.py
@@ -43,7 +43,7 @@
@smart_inference_mode()
def run(
- data=ROOT / '../datasets/mnist', # dataset dir
+ data='../datasets/mnist', # dataset dir
weights='yolov5s-cls.pt', # model.pt path(s)
batch_size=None, # batch size
batch=None, # batch size
@@ -155,14 +155,14 @@ def run(
def parse_opt():
parser = argparse.ArgumentParser()
- parser.add_argument('--data', type=str, default=ROOT / '../datasets/mnist', help='dataset path')
- parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s-cls.pt', help='model.pt path(s)')
+ parser.add_argument('--data', type=str, default='../datasets/mnist', help='dataset path')
+ parser.add_argument('--weights', nargs='+', type=str, default='yolov5s-cls.pt', help='model.pt path(s)')
parser.add_argument('--batch-size', type=int, default=128, help='batch size')
parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=224, help='inference size (pixels)')
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)')
parser.add_argument('--verbose', nargs='?', const=True, default=True, help='verbose output')
- parser.add_argument('--project', default=ROOT / 'runs/val-cls', help='save to project/name')
+ parser.add_argument('--project', default='runs/val-cls', help='save to project/name')
parser.add_argument('--name', default='exp', help='save to project/name')
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
diff --git a/yolov5/data/hyps/hyp.no-augmentation.yaml b/yolov5/data/hyps/hyp.no-augmentation.yaml
new file mode 100644
index 0000000..8fbd5b2
--- /dev/null
+++ b/yolov5/data/hyps/hyp.no-augmentation.yaml
@@ -0,0 +1,35 @@
+# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
+# Hyperparameters when using Albumentations frameworks
+# python train.py --hyp hyp.no-augmentation.yaml
+# See https://github.com/ultralytics/yolov5/pull/3882 for YOLOv5 + Albumentations Usage examples
+
+lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
+lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
+momentum: 0.937 # SGD momentum/Adam beta1
+weight_decay: 0.0005 # optimizer weight decay 5e-4
+warmup_epochs: 3.0 # warmup epochs (fractions ok)
+warmup_momentum: 0.8 # warmup initial momentum
+warmup_bias_lr: 0.1 # warmup initial bias lr
+box: 0.05 # box loss gain
+cls: 0.3 # cls loss gain
+cls_pw: 1.0 # cls BCELoss positive_weight
+obj: 0.7 # obj loss gain (scale with pixels)
+obj_pw: 1.0 # obj BCELoss positive_weight
+iou_t: 0.20 # IoU training threshold
+anchor_t: 4.0 # anchor-multiple threshold
+# anchors: 3 # anchors per output layer (0 to ignore)
+# this parameters are all zero since we want to use albumentation framework
+fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
+hsv_h: 0 # image HSV-Hue augmentation (fraction)
+hsv_s: 00 # image HSV-Saturation augmentation (fraction)
+hsv_v: 0 # image HSV-Value augmentation (fraction)
+degrees: 0.0 # image rotation (+/- deg)
+translate: 0 # image translation (+/- fraction)
+scale: 0 # image scale (+/- gain)
+shear: 0 # image shear (+/- deg)
+perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
+flipud: 0.0 # image flip up-down (probability)
+fliplr: 0.0 # image flip left-right (probability)
+mosaic: 0.0 # image mosaic (probability)
+mixup: 0.0 # image mixup (probability)
+copy_paste: 0.0 # segment copy-paste (probability)
diff --git a/yolov5/detect.py b/yolov5/detect.py
index 771ce7b..153f2c2 100644
--- a/yolov5/detect.py
+++ b/yolov5/detect.py
@@ -262,7 +262,7 @@ def parse_opt():
def main():
opt = parse_opt()
- #check_requirements(exclude=('tensorboard', 'thop'))
+ check_requirements(exclude=('tensorboard', 'thop'))
run(**vars(opt))
diff --git a/yolov5/export.py b/yolov5/export.py
index e041399..d7cd89a 100644
--- a/yolov5/export.py
+++ b/yolov5/export.py
@@ -132,7 +132,7 @@ def export_torchscript(model, im, file, optimize, prefix=colorstr('TorchScript:'
@try_export
def export_onnx(model, im, file, opset, dynamic, simplify, prefix=colorstr('ONNX:')):
# YOLOv5 ONNX export
- check_requirements('onnx')
+ check_requirements('onnx>=1.12.0')
import onnx
LOGGER.info(f'\n{prefix} starting export with onnx {onnx.__version__}...')
@@ -615,13 +615,13 @@ def run(
LOGGER.info(f'\nExport complete ({time.time() - t:.1f}s)'
f"\nResults saved to {colorstr('bold', file.parent.resolve())}"
f"\nDetect: yolov5 {'detect' if det else 'predict'} --weights {f[-1]} {h}"
- f"\nValidate: yolov5 yolov5 val --weights {f[-1]} {h}"
- f"\nnPython: model = yolov5.load('{f[-1]}') {s}"
+ f"\nValidate: yolov5 val --weights {f[-1]} {h}"
+ f"\nPython: model = yolov5.load('{f[-1]}') {s}"
f"\nVisualize: https://netron.app")
return f # return list of exported files/dirs
-def parse_opt():
+def parse_opt(known=False):
parser = argparse.ArgumentParser()
parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path')
parser.add_argument('--weights', nargs='+', type=str, default='yolov5s.pt', help='model.pt path(s)')
@@ -635,7 +635,7 @@ def parse_opt():
parser.add_argument('--int8', action='store_true', help='CoreML/TF INT8 quantization')
parser.add_argument('--dynamic', action='store_true', help='ONNX/TF/TensorRT: dynamic axes')
parser.add_argument('--simplify', action='store_true', help='ONNX: simplify model')
- parser.add_argument('--opset', type=int, default=12, help='ONNX: opset version')
+ parser.add_argument('--opset', type=int, default=17, help='ONNX: opset version')
parser.add_argument('--verbose', action='store_true', help='TensorRT: verbose log')
parser.add_argument('--workspace', type=int, default=4, help='TensorRT: workspace size (GB)')
parser.add_argument('--nms', action='store_true', help='TF: add NMS to model')
@@ -649,7 +649,7 @@ def parse_opt():
nargs='+',
default=['torchscript'],
help='torchscript, onnx, openvino, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs, paddle')
- opt = parser.parse_args()
+ opt = parser.parse_known_args()[0] if known else parser.parse_args()
print_args(vars(opt))
return opt
diff --git a/yolov5/models/common.py b/yolov5/models/common.py
index 2497957..b2de4d0 100644
--- a/yolov5/models/common.py
+++ b/yolov5/models/common.py
@@ -27,7 +27,7 @@
from yolov5.utils import TryExcept
from yolov5.utils.dataloaders import exif_transpose, letterbox
-from yolov5.utils.downloads import attempt_donwload_from_hub
+from yolov5.utils.downloads import attempt_download_from_hub
from yolov5.utils.general import (LOGGER, ROOT, Profile, check_requirements, check_suffix, check_version, colorstr,
increment_path, is_notebook, make_divisible, non_max_suppression, scale_boxes, xywh2xyxy,
xyxy2xywh, yaml_load)
@@ -333,11 +333,10 @@ def __init__(self, weights='yolov5s.pt', device=torch.device('cpu'), dnn=False,
from yolov5.models.experimental import attempt_download, attempt_load # scoped to avoid circular import
super().__init__()
-
w = str(weights[0] if isinstance(weights, list) else weights)
# try to dowload from hf hub
- result = attempt_donwload_from_hub(w, hf_token=hf_token)
+ result = attempt_download_from_hub(w, hf_token=hf_token)
if result is not None:
w = result
diff --git a/yolov5/segment/train.py b/yolov5/segment/train.py
index d0a0b08..e8baca5 100644
--- a/yolov5/segment/train.py
+++ b/yolov5/segment/train.py
@@ -47,7 +47,7 @@
from yolov5.utils.autoanchor import check_anchors
from yolov5.utils.autobatch import check_train_batch_size
from yolov5.utils.callbacks import Callbacks
-from yolov5.utils.downloads import (attempt_donwload_from_hub,
+from yolov5.utils.downloads import (attempt_download_from_hub,
attempt_download, is_url)
from yolov5.utils.general import (LOGGER, TQDM_BAR_FORMAT, check_amp,
check_dataset, check_file, check_git_info,
@@ -119,7 +119,7 @@ def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictio
# Model
# try to download from hf hub
- result = attempt_donwload_from_hub(weights, hf_token=None)
+ result = attempt_download_from_hub(weights, hf_token=None)
if result is not None:
weights = result
check_suffix(weights, '.pt') # check weights
diff --git a/yolov5/train.py b/yolov5/train.py
index 7e8154d..1091aff 100644
--- a/yolov5/train.py
+++ b/yolov5/train.py
@@ -36,6 +36,7 @@
from yolov5.helpers import (convert_coco_dataset_to_yolo, push_to_hfhub,
upload_to_s3)
from yolov5.utils.roboflow import check_dataset_roboflow
+from yolov5 import __version__
FILE = Path(__file__).resolve()
ROOT = FILE.parents[0] # YOLOv5 root directory
@@ -50,25 +51,19 @@
from yolov5.utils.autobatch import check_train_batch_size
from yolov5.utils.callbacks import Callbacks
from yolov5.utils.dataloaders import create_dataloader
-from yolov5.utils.downloads import (attempt_donwload_from_hub,
- attempt_download, is_url)
-from yolov5.utils.general import (LOGGER, TQDM_BAR_FORMAT, check_amp,
- check_dataset, check_file, check_img_size,
- check_suffix, check_yaml, colorstr,
- get_latest_run, increment_path, init_seeds,
- intersect_dicts, labels_to_class_weights,
- labels_to_image_weights, methods, one_cycle,
- print_args, print_mutation, strip_optimizer,
- yaml_save)
+from yolov5.utils.downloads import attempt_download, is_url, attempt_download_from_hub
+from yolov5.utils.general import (LOGGER, TQDM_BAR_FORMAT, check_amp, check_dataset, check_file, check_git_info,
+ check_git_status, check_img_size, check_requirements, check_suffix, check_yaml, colorstr,
+ get_latest_run, increment_path, init_seeds, intersect_dicts, labels_to_class_weights,
+ labels_to_image_weights, methods, one_cycle, print_args, print_mutation, strip_optimizer,
+ yaml_save)
from yolov5.utils.loggers import Loggers
from yolov5.utils.loggers.comet.comet_utils import check_comet_resume
from yolov5.utils.loss import ComputeLoss
from yolov5.utils.metrics import fitness
from yolov5.utils.plots import plot_evolve
-from yolov5.utils.torch_utils import (EarlyStopping, ModelEMA, de_parallel,
- select_device, smart_DDP,
- smart_optimizer, smart_resume,
- torch_distributed_zero_first)
+from yolov5.utils.torch_utils import (EarlyStopping, ModelEMA, de_parallel, select_device, smart_DDP, smart_optimizer,
+ smart_resume, torch_distributed_zero_first)
LOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html
RANK = int(os.getenv('RANK', -1))
@@ -134,7 +129,7 @@ def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictio
# Model
# try to download from hf hub
- result = attempt_donwload_from_hub(weights, hf_token=None)
+ result = attempt_download_from_hub(weights, hf_token=None)
if result is not None:
weights = result
check_suffix(weights, '.pt') # check weights
@@ -222,7 +217,8 @@ def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictio
image_weights=opt.image_weights,
quad=opt.quad,
prefix=colorstr('train: '),
- shuffle=True)
+ shuffle=True,
+ seed=opt.seed)
labels = np.concatenate(dataset.labels, 0)
mlc = int(labels[:, 0].max()) # max label class
assert mlc < nc, f'Label class {mlc} exceeds nc={nc} in {data}. Possible class labels are 0-{nc - 1}'
@@ -271,7 +267,6 @@ def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictio
# nw = min(nw, (epochs - start_epoch) / 2 * nb) # limit warmup to < 1/2 of training
last_opt_step = -1
maps = np.zeros(nc) # mAP per class
- map50s = np.zeros(nc) # mAP50 per class
results = (0, 0, 0, 0, 0, 0, 0) # P, R, mAP@.5, mAP@.5-.95, val_loss(box, obj, cls)
scheduler.last_epoch = start_epoch - 1 # do not move
scaler = torch.cuda.amp.GradScaler(enabled=amp)
@@ -402,7 +397,8 @@ def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictio
'updates': ema.updates,
'optimizer': optimizer.state_dict(),
'opt': vars(opt),
- 'date': datetime.now().isoformat()}
+ 'date': datetime.now().isoformat(),
+ 'yolov5pip_version': __version__}
# Save last, best and delete
torch.save(ckpt, last)
@@ -442,7 +438,7 @@ def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictio
strip_optimizer(f) # strip optimizers
if f is best:
LOGGER.info(f'\nValidating {f}...')
- results, _, _, _ = validate.run(
+ results, _, _, _ = validate.run(
data_dict,
batch_size=batch_size // WORLD_SIZE * 2,
imgsz=imgsz,
@@ -557,7 +553,7 @@ def main(opt, callbacks=Callbacks()):
if RANK in {-1, 0}:
print_args(vars(opt))
#check_git_status()
- #check_requirements()
+ check_requirements()
if "roboflow.com" in str(opt.data):
opt.data = check_dataset_roboflow(
@@ -711,6 +707,7 @@ def run(**kwargs):
main(opt)
return opt
+
def run_cli(**kwargs):
'''
To be called from yolov5.cli
@@ -720,6 +717,7 @@ def run_cli(**kwargs):
setattr(opt, k, v)
main(opt)
+
if __name__ == "__main__":
opt = parse_opt()
main(opt)
diff --git a/yolov5/utils/dataloaders.py b/yolov5/utils/dataloaders.py
index b35e35d..8e80535 100644
--- a/yolov5/utils/dataloaders.py
+++ b/yolov5/utils/dataloaders.py
@@ -115,7 +115,8 @@ def create_dataloader(path,
image_weights=False,
quad=False,
prefix='',
- shuffle=False):
+ shuffle=False,
+ seed=0):
if rect and shuffle:
LOGGER.warning('WARNING ⚠️ --rect is incompatible with DataLoader shuffle, setting shuffle=False')
shuffle = False
@@ -141,7 +142,7 @@ def create_dataloader(path,
sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
loader = DataLoader if image_weights else InfiniteDataLoader # only DataLoader allows for attribute updates
generator = torch.Generator()
- generator.manual_seed(6148914691236517205 + RANK)
+ generator.manual_seed(6148914691236517205 + seed + RANK)
return loader(dataset,
batch_size=batch_size,
shuffle=shuffle and sampler is None,
@@ -756,7 +757,7 @@ def load_image(self, i):
r = self.img_size / max(h0, w0) # ratio
if r != 1: # if sizes are not equal
interp = cv2.INTER_LINEAR if (self.augment or r > 1) else cv2.INTER_AREA
- im = cv2.resize(im, (int(w0 * r), int(h0 * r)), interpolation=interp)
+ im = cv2.resize(im, (math.ceil(w0 * r), math.ceil(h0 * r)), interpolation=interp)
return im, (h0, w0), im.shape[:2] # im, hw_original, hw_resized
return self.ims[i], self.im_hw0[i], self.im_hw[i] # im, hw_original, hw_resized
diff --git a/yolov5/utils/downloads.py b/yolov5/utils/downloads.py
index a4bdb9b..394d9a0 100644
--- a/yolov5/utils/downloads.py
+++ b/yolov5/utils/downloads.py
@@ -71,7 +71,7 @@ def github_assets(repository, version='latest'):
return response['tag_name'], [x['name'] for x in response['assets']] # tag, assets
# try to download from hf hub
- result = attempt_donwload_from_hub(file, hf_token=hf_token)
+ result = attempt_download_from_hub(file, hf_token=hf_token)
if result is not None:
file = result
@@ -110,8 +110,6 @@ def github_assets(repository, version='latest'):
min_bytes=1E5,
error_msg=f'{file} missing, try downloading from https://github.com/{repo}/releases/{tag} or {url3}')
-
-
return str(file)
@@ -128,7 +126,7 @@ def get_model_filename_from_hfhub(repo_id, hf_token=None):
return None
-def attempt_donwload_from_hub(repo_id, hf_token=None):
+def attempt_download_from_hub(repo_id, hf_token=None):
from huggingface_hub import hf_hub_download, list_repo_files
from huggingface_hub.utils._errors import RepositoryNotFoundError
from huggingface_hub.utils._validators import HFValidationError
diff --git a/yolov5/utils/general.py b/yolov5/utils/general.py
index 0695da5..a29e893 100644
--- a/yolov5/utils/general.py
+++ b/yolov5/utils/general.py
@@ -750,30 +750,30 @@ def coco80_to_coco91_class(): # converts 80-index (val2014) to 91-index (paper)
def xyxy2xywh(x):
# Convert nx4 boxes from [x1, y1, x2, y2] to [x, y, w, h] where xy1=top-left, xy2=bottom-right
y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
- y[:, 0] = (x[:, 0] + x[:, 2]) / 2 # x center
- y[:, 1] = (x[:, 1] + x[:, 3]) / 2 # y center
- y[:, 2] = x[:, 2] - x[:, 0] # width
- y[:, 3] = x[:, 3] - x[:, 1] # height
+ y[..., 0] = (x[..., 0] + x[..., 2]) / 2 # x center
+ y[..., 1] = (x[..., 1] + x[..., 3]) / 2 # y center
+ y[..., 2] = x[..., 2] - x[..., 0] # width
+ y[..., 3] = x[..., 3] - x[..., 1] # height
return y
def xywh2xyxy(x):
# Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
- y[:, 0] = x[:, 0] - x[:, 2] / 2 # top left x
- y[:, 1] = x[:, 1] - x[:, 3] / 2 # top left y
- y[:, 2] = x[:, 0] + x[:, 2] / 2 # bottom right x
- y[:, 3] = x[:, 1] + x[:, 3] / 2 # bottom right y
+ y[..., 0] = x[..., 0] - x[..., 2] / 2 # top left x
+ y[..., 1] = x[..., 1] - x[..., 3] / 2 # top left y
+ y[..., 2] = x[..., 0] + x[..., 2] / 2 # bottom right x
+ y[..., 3] = x[..., 1] + x[..., 3] / 2 # bottom right y
return y
def xywhn2xyxy(x, w=640, h=640, padw=0, padh=0):
# Convert nx4 boxes from [x, y, w, h] normalized to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
- y[:, 0] = w * (x[:, 0] - x[:, 2] / 2) + padw # top left x
- y[:, 1] = h * (x[:, 1] - x[:, 3] / 2) + padh # top left y
- y[:, 2] = w * (x[:, 0] + x[:, 2] / 2) + padw # bottom right x
- y[:, 3] = h * (x[:, 1] + x[:, 3] / 2) + padh # bottom right y
+ y[..., 0] = w * (x[..., 0] - x[..., 2] / 2) + padw # top left x
+ y[..., 1] = h * (x[..., 1] - x[..., 3] / 2) + padh # top left y
+ y[..., 2] = w * (x[..., 0] + x[..., 2] / 2) + padw # bottom right x
+ y[..., 3] = h * (x[..., 1] + x[..., 3] / 2) + padh # bottom right y
return y
@@ -782,18 +782,18 @@ def xyxy2xywhn(x, w=640, h=640, clip=False, eps=0.0):
if clip:
clip_boxes(x, (h - eps, w - eps)) # warning: inplace clip
y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
- y[:, 0] = ((x[:, 0] + x[:, 2]) / 2) / w # x center
- y[:, 1] = ((x[:, 1] + x[:, 3]) / 2) / h # y center
- y[:, 2] = (x[:, 2] - x[:, 0]) / w # width
- y[:, 3] = (x[:, 3] - x[:, 1]) / h # height
+ y[..., 0] = ((x[..., 0] + x[..., 2]) / 2) / w # x center
+ y[..., 1] = ((x[..., 1] + x[..., 3]) / 2) / h # y center
+ y[..., 2] = (x[..., 2] - x[..., 0]) / w # width
+ y[..., 3] = (x[..., 3] - x[..., 1]) / h # height
return y
def xyn2xy(x, w=640, h=640, padw=0, padh=0):
# Convert normalized segments into pixel segments, shape (n,2)
y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
- y[:, 0] = w * x[:, 0] + padw # top left x
- y[:, 1] = h * x[:, 1] + padh # top left y
+ y[..., 0] = w * x[..., 0] + padw # top left x
+ y[..., 1] = h * x[..., 1] + padh # top left y
return y
@@ -833,9 +833,9 @@ def scale_boxes(img1_shape, boxes, img0_shape, ratio_pad=None):
gain = ratio_pad[0][0]
pad = ratio_pad[1]
- boxes[:, [0, 2]] -= pad[0] # x padding
- boxes[:, [1, 3]] -= pad[1] # y padding
- boxes[:, :4] /= gain
+ boxes[..., [0, 2]] -= pad[0] # x padding
+ boxes[..., [1, 3]] -= pad[1] # y padding
+ boxes[..., :4] /= gain
clip_boxes(boxes, img0_shape)
return boxes
@@ -862,13 +862,13 @@ def scale_segments(img1_shape, segments, img0_shape, ratio_pad=None, normalize=F
def clip_boxes(boxes, shape):
# Clip boxes (xyxy) to image shape (height, width)
if isinstance(boxes, torch.Tensor): # faster individually
- boxes[:, 0].clamp_(0, shape[1]) # x1
- boxes[:, 1].clamp_(0, shape[0]) # y1
- boxes[:, 2].clamp_(0, shape[1]) # x2
- boxes[:, 3].clamp_(0, shape[0]) # y2
+ boxes[..., 0].clamp_(0, shape[1]) # x1
+ boxes[..., 1].clamp_(0, shape[0]) # y1
+ boxes[..., 2].clamp_(0, shape[1]) # x2
+ boxes[..., 3].clamp_(0, shape[0]) # y2
else: # np.array (faster grouped)
- boxes[:, [0, 2]] = boxes[:, [0, 2]].clip(0, shape[1]) # x1, x2
- boxes[:, [1, 3]] = boxes[:, [1, 3]].clip(0, shape[0]) # y1, y2
+ boxes[..., [0, 2]] = boxes[..., [0, 2]].clip(0, shape[1]) # x1, x2
+ boxes[..., [1, 3]] = boxes[..., [1, 3]].clip(0, shape[0]) # y1, y2
def clip_segments(segments, shape):
@@ -898,6 +898,9 @@ def non_max_suppression(
list of detections, on (n,6) tensor per image [xyxy, conf, cls]
"""
+ # Checks
+ assert 0 <= conf_thres <= 1, f'Invalid Confidence threshold {conf_thres}, valid values are between 0.0 and 1.0'
+ assert 0 <= iou_thres <= 1, f'Invalid IoU {iou_thres}, valid values are between 0.0 and 1.0'
if isinstance(prediction, (list, tuple)): # YOLOv5 model in validation model, output = (inference_out, loss_out)
prediction = prediction[0] # select only inference output
@@ -909,10 +912,6 @@ def non_max_suppression(
nc = prediction.shape[2] - nm - 5 # number of classes
xc = prediction[..., 4] > conf_thres # candidates
- # Checks
- assert 0 <= conf_thres <= 1, f'Invalid Confidence threshold {conf_thres}, valid values are between 0.0 and 1.0'
- assert 0 <= iou_thres <= 1, f'Invalid IoU {iou_thres}, valid values are between 0.0 and 1.0'
-
# Settings
# min_wh = 2 # (pixels) minimum box width and height
max_wh = 7680 # (pixels) maximum box width and height
@@ -970,17 +969,13 @@ def non_max_suppression(
n = x.shape[0] # number of boxes
if not n: # no boxes
continue
- elif n > max_nms: # excess boxes
- x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
- else:
- x = x[x[:, 4].argsort(descending=True)] # sort by confidence
+ x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence and remove excess boxes
# Batched NMS
c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
i = torchvision.ops.nms(boxes, scores, iou_thres) # NMS
- if i.shape[0] > max_det: # limit detections
- i = i[:max_det]
+ i = i[:max_det] # limit detections
if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)
# update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix
diff --git a/yolov5/utils/loggers/__init__.py b/yolov5/utils/loggers/__init__.py
index ed1354e..b93d3b5 100644
--- a/yolov5/utils/loggers/__init__.py
+++ b/yolov5/utils/loggers/__init__.py
@@ -115,6 +115,17 @@ def __init__(self, save_dir=None, weights=None, opt=None, hyp=None, logger=None,
if not neptune:
prefix = colorstr('Neptune AI: ')
s = f"{prefix}run 'pip install neptune-client' to automatically track and visualize YOLOv5 🚀 runs"
+ # if not wandb:
+ # prefix = colorstr('Weights & Biases: ')
+ # s = f"{prefix}run 'pip install wandb' to automatically track and visualize YOLOv5 🚀 runs in Weights & Biases"
+ # self.logger.info(s)
+ # if not clearml:
+ # prefix = colorstr('ClearML: ')
+ # s = f"{prefix}run 'pip install clearml' to automatically track, visualize and remotely train YOLOv5 🚀 in ClearML"
+ # self.logger.info(s)
+ # if not comet_ml:
+ # prefix = colorstr('Comet: ')
+ # s = f"{prefix}run 'pip install comet_ml' to automatically track and visualize YOLOv5 🚀 runs in Comet"
self.logger.info(s)
# TensorBoard
s = self.save_dir
@@ -129,6 +140,10 @@ def __init__(self, save_dir=None, weights=None, opt=None, hyp=None, logger=None,
run_id = torch.load(self.weights).get('wandb_id') if self.opt.resume and not wandb_artifact_resume else None
self.opt.hyp = self.hyp # add hyperparameters
self.wandb = WandbLogger(self.opt, run_id)
+ # temp warn. because nested artifacts not supported after 0.12.10
+ # if pkg.parse_version(wandb.__version__) >= pkg.parse_version('0.12.11'):
+ # s = "YOLOv5 temporarily requires wandb version 0.12.10 or below. Some features may not work as expected."
+ # self.logger.warning(s)
else:
self.wandb = None
diff --git a/yolov5/utils/loggers/comet/README.md b/yolov5/utils/loggers/comet/README.md
index 3a51cb9..8a361e2 100644
--- a/yolov5/utils/loggers/comet/README.md
+++ b/yolov5/utils/loggers/comet/README.md
@@ -2,13 +2,13 @@
# YOLOv5 with Comet
-This guide will cover how to use YOLOv5 with [Comet](https://bit.ly/yolov5-readme-comet)
+This guide will cover how to use YOLOv5 with [Comet](https://bit.ly/yolov5-readme-comet2)
# About Comet
Comet builds tools that help data scientists, engineers, and team leaders accelerate and optimize machine learning and deep learning models.
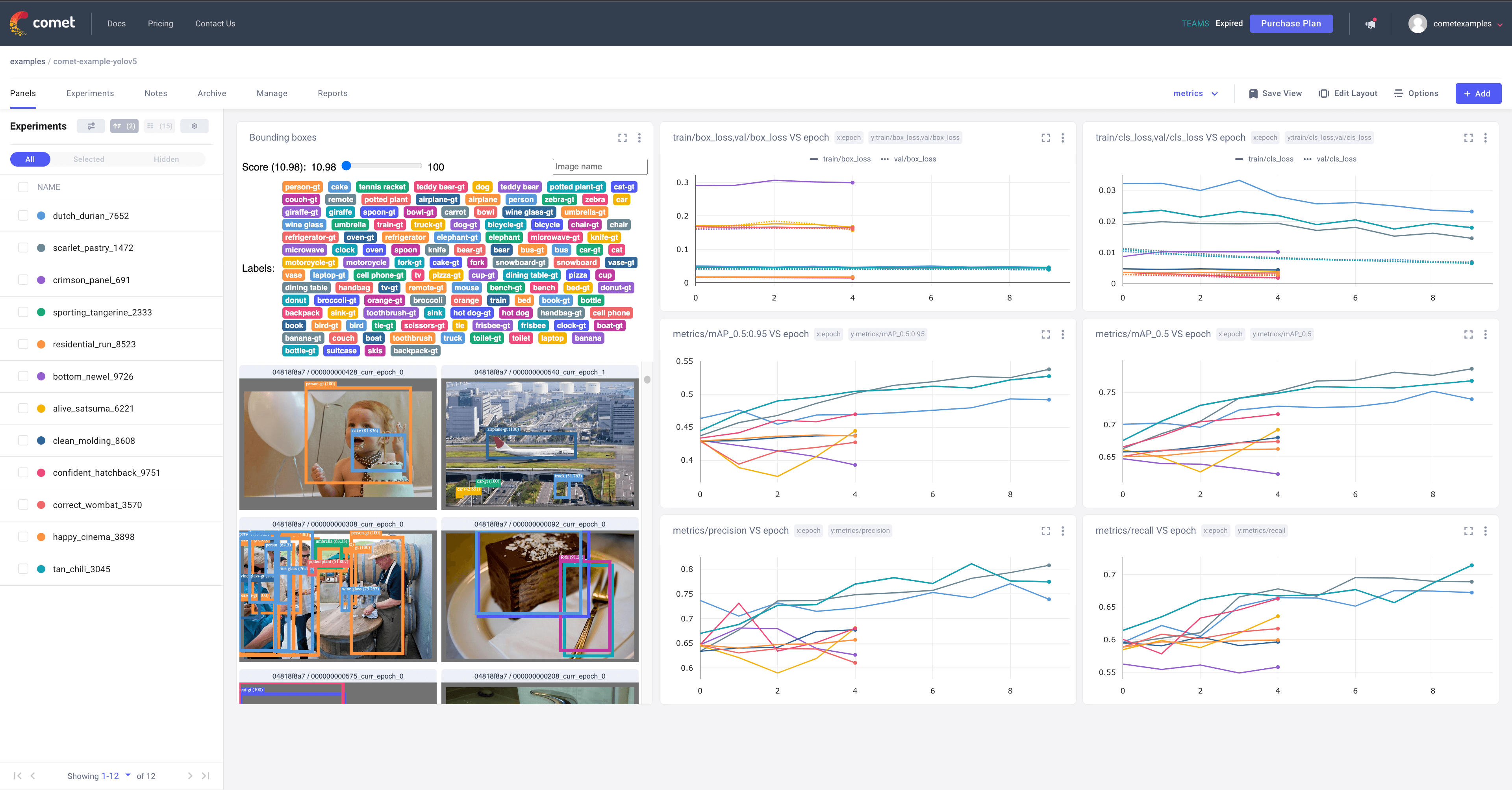
-Track and visualize model metrics in real time, save your hyperparameters, datasets, and model checkpoints, and visualize your model predictions with [Comet Custom Panels](https://bit.ly/yolov5-colab-comet-panels)!
+Track and visualize model metrics in real time, save your hyperparameters, datasets, and model checkpoints, and visualize your model predictions with [Comet Custom Panels](https://www.comet.com/docs/v2/guides/comet-dashboard/code-panels/about-panels/?utm_source=yolov5&utm_medium=partner&utm_campaign=partner_yolov5_2022&utm_content=github)!
Comet makes sure you never lose track of your work and makes it easy to share results and collaborate across teams of all sizes!
# Getting Started
@@ -51,10 +51,10 @@ python train.py --img 640 --batch 16 --epochs 5 --data coco128.yaml --weights yo
That's it! Comet will automatically log your hyperparameters, command line arguments, training and valiation metrics. You can visualize and analyze your runs in the Comet UI
- +
+ # Try out an Example!
-Check out an example of a [completed run here](https://www.comet.com/examples/comet-example-yolov5/a0e29e0e9b984e4a822db2a62d0cb357?experiment-tab=chart&showOutliers=true&smoothing=0&transformY=smoothing&xAxis=step&ref=yolov5&utm_source=yolov5&utm_medium=affilliate&utm_campaign=yolov5_comet_integration)
+Check out an example of a [completed run here](https://www.comet.com/examples/comet-example-yolov5/a0e29e0e9b984e4a822db2a62d0cb357?experiment-tab=chart&showOutliers=true&smoothing=0&transformY=smoothing&xAxis=step&utm_source=yolov5&utm_medium=partner&utm_campaign=partner_yolov5_2022&utm_content=github)
Or better yet, try it out yourself in this Colab Notebook
@@ -119,7 +119,7 @@ You can control the frequency of logged predictions and the associated images by
**Note:** The YOLOv5 validation dataloader will default to a batch size of 32, so you will have to set the logging frequency accordingly.
-Here is an [example project using the Panel](https://www.comet.com/examples/comet-example-yolov5?shareable=YcwMiJaZSXfcEXpGOHDD12vA1&ref=yolov5&utm_source=yolov5&utm_medium=affilliate&utm_campaign=yolov5_comet_integration)
+Here is an [example project using the Panel](https://www.comet.com/examples/comet-example-yolov5?shareable=YcwMiJaZSXfcEXpGOHDD12vA1&utm_source=yolov5&utm_medium=partner&utm_campaign=partner_yolov5_2022&utm_content=github)
```shell
@@ -161,7 +161,7 @@ env COMET_LOG_PER_CLASS_METRICS=true python train.py \
## Uploading a Dataset to Comet Artifacts
-If you would like to store your data using [Comet Artifacts](https://www.comet.com/docs/v2/guides/data-management/using-artifacts/#learn-more?ref=yolov5&utm_source=yolov5&utm_medium=affilliate&utm_campaign=yolov5_comet_integration), you can do so using the `upload_dataset` flag.
+If you would like to store your data using [Comet Artifacts](https://www.comet.com/docs/v2/guides/data-management/using-artifacts/#learn-more?utm_source=yolov5&utm_medium=partner&utm_campaign=partner_yolov5_2022&utm_content=github), you can do so using the `upload_dataset` flag.
The dataset be organized in the way described in the [YOLOv5 documentation](https://docs.ultralytics.com/tutorials/train-custom-datasets/#3-organize-directories). The dataset config `yaml` file must follow the same format as that of the `coco128.yaml` file.
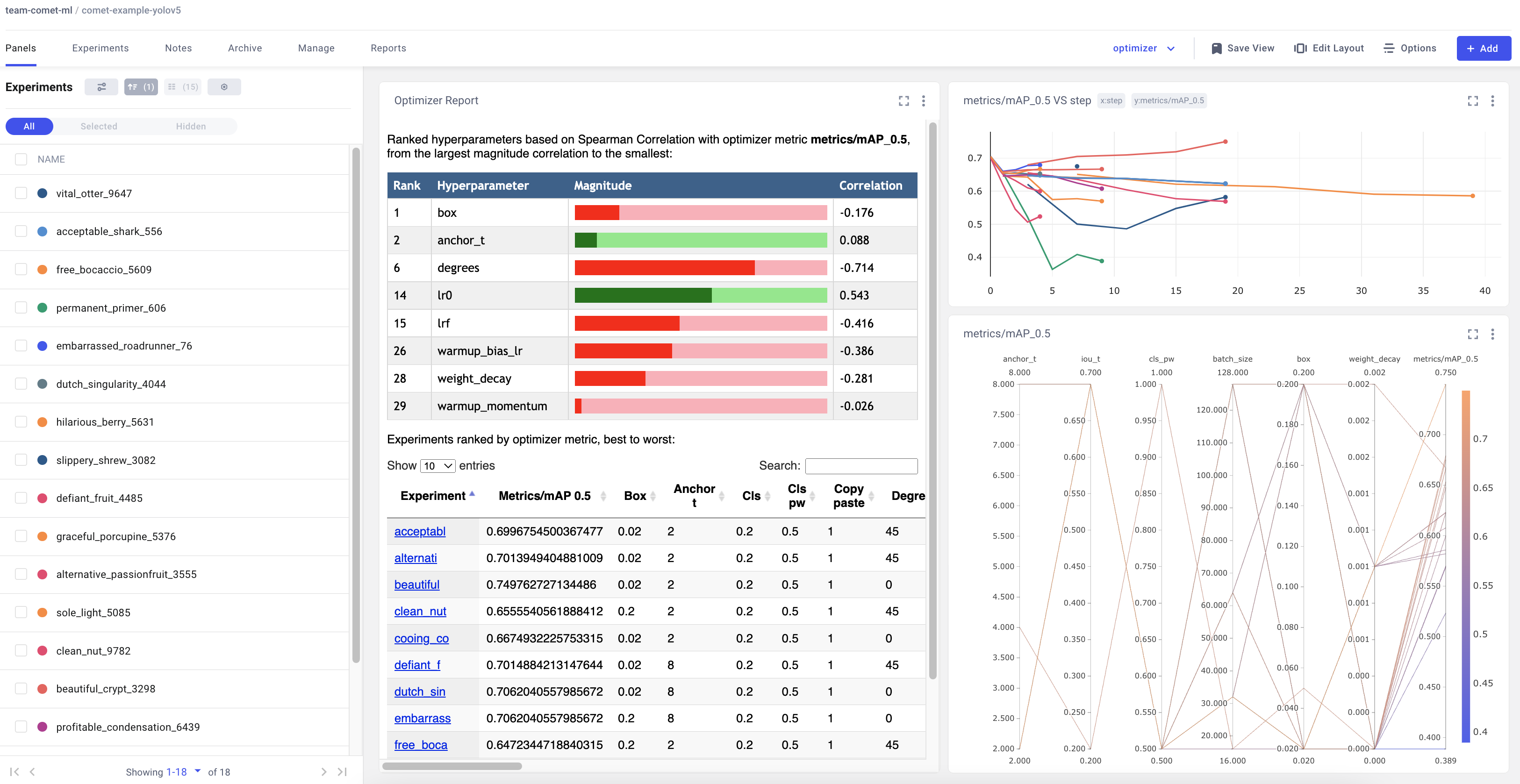
@@ -251,6 +251,6 @@ comet optimizer -j utils/loggers/comet/hpo.py \
### Visualizing Results
-Comet provides a number of ways to visualize the results of your sweep. Take a look at a [project with a completed sweep here](https://www.comet.com/examples/comet-example-yolov5/view/PrlArHGuuhDTKC1UuBmTtOSXD/panels?ref=yolov5&utm_source=yolov5&utm_medium=affilliate&utm_campaign=yolov5_comet_integration)
+Comet provides a number of ways to visualize the results of your sweep. Take a look at a [project with a completed sweep here](https://www.comet.com/examples/comet-example-yolov5/view/PrlArHGuuhDTKC1UuBmTtOSXD/panels?utm_source=yolov5&utm_medium=partner&utm_campaign=partner_yolov5_2022&utm_content=github)
# Try out an Example!
-Check out an example of a [completed run here](https://www.comet.com/examples/comet-example-yolov5/a0e29e0e9b984e4a822db2a62d0cb357?experiment-tab=chart&showOutliers=true&smoothing=0&transformY=smoothing&xAxis=step&ref=yolov5&utm_source=yolov5&utm_medium=affilliate&utm_campaign=yolov5_comet_integration)
+Check out an example of a [completed run here](https://www.comet.com/examples/comet-example-yolov5/a0e29e0e9b984e4a822db2a62d0cb357?experiment-tab=chart&showOutliers=true&smoothing=0&transformY=smoothing&xAxis=step&utm_source=yolov5&utm_medium=partner&utm_campaign=partner_yolov5_2022&utm_content=github)
Or better yet, try it out yourself in this Colab Notebook
@@ -119,7 +119,7 @@ You can control the frequency of logged predictions and the associated images by
**Note:** The YOLOv5 validation dataloader will default to a batch size of 32, so you will have to set the logging frequency accordingly.
-Here is an [example project using the Panel](https://www.comet.com/examples/comet-example-yolov5?shareable=YcwMiJaZSXfcEXpGOHDD12vA1&ref=yolov5&utm_source=yolov5&utm_medium=affilliate&utm_campaign=yolov5_comet_integration)
+Here is an [example project using the Panel](https://www.comet.com/examples/comet-example-yolov5?shareable=YcwMiJaZSXfcEXpGOHDD12vA1&utm_source=yolov5&utm_medium=partner&utm_campaign=partner_yolov5_2022&utm_content=github)
```shell
@@ -161,7 +161,7 @@ env COMET_LOG_PER_CLASS_METRICS=true python train.py \
## Uploading a Dataset to Comet Artifacts
-If you would like to store your data using [Comet Artifacts](https://www.comet.com/docs/v2/guides/data-management/using-artifacts/#learn-more?ref=yolov5&utm_source=yolov5&utm_medium=affilliate&utm_campaign=yolov5_comet_integration), you can do so using the `upload_dataset` flag.
+If you would like to store your data using [Comet Artifacts](https://www.comet.com/docs/v2/guides/data-management/using-artifacts/#learn-more?utm_source=yolov5&utm_medium=partner&utm_campaign=partner_yolov5_2022&utm_content=github), you can do so using the `upload_dataset` flag.
The dataset be organized in the way described in the [YOLOv5 documentation](https://docs.ultralytics.com/tutorials/train-custom-datasets/#3-organize-directories). The dataset config `yaml` file must follow the same format as that of the `coco128.yaml` file.
@@ -251,6 +251,6 @@ comet optimizer -j utils/loggers/comet/hpo.py \
### Visualizing Results
-Comet provides a number of ways to visualize the results of your sweep. Take a look at a [project with a completed sweep here](https://www.comet.com/examples/comet-example-yolov5/view/PrlArHGuuhDTKC1UuBmTtOSXD/panels?ref=yolov5&utm_source=yolov5&utm_medium=affilliate&utm_campaign=yolov5_comet_integration)
+Comet provides a number of ways to visualize the results of your sweep. Take a look at a [project with a completed sweep here](https://www.comet.com/examples/comet-example-yolov5/view/PrlArHGuuhDTKC1UuBmTtOSXD/panels?utm_source=yolov5&utm_medium=partner&utm_campaign=partner_yolov5_2022&utm_content=github)
 diff --git a/yolov5/utils/loggers/wandb/wandb_utils.py b/yolov5/utils/loggers/wandb/wandb_utils.py
index 35485f4..17c4b00 100644
--- a/yolov5/utils/loggers/wandb/wandb_utils.py
+++ b/yolov5/utils/loggers/wandb/wandb_utils.py
@@ -17,7 +17,7 @@
from yolov5 import __version__
from yolov5.utils.dataloaders import LoadImagesAndLabels, img2label_paths
-from yolov5.utils.general import LOGGER, check_dataset, check_file
+from utils.general import LOGGER, check_dataset, check_file
try:
import wandb
diff --git a/yolov5/utils/metrics.py b/yolov5/utils/metrics.py
index 52c7919..ff6946a 100644
--- a/yolov5/utils/metrics.py
+++ b/yolov5/utils/metrics.py
@@ -208,7 +208,7 @@ def plot(self, normalize=True, save_dir='', names=()):
vmin=0.0,
xticklabels=ticklabels,
yticklabels=ticklabels).set_facecolor((1, 1, 1))
- ax.set_ylabel('True')
+ ax.set_xlabel('True')
ax.set_ylabel('Predicted')
ax.set_title('Confusion Matrix')
fig.savefig(Path(save_dir) / 'confusion_matrix.png', dpi=250)
diff --git a/yolov5/utils/plots.py b/yolov5/utils/plots.py
index fffa5bc..08a9c71 100644
--- a/yolov5/utils/plots.py
+++ b/yolov5/utils/plots.py
@@ -88,7 +88,8 @@ def box_label(self, box, label='', color=(128, 128, 128), txt_color=(255, 255, 2
if self.pil or not is_ascii(label):
self.draw.rectangle(box, width=self.lw, outline=color) # box
if label:
- w, h = self.font.getsize(label) # text width, height
+ w, h = self.font.getsize(label) # text width, height (WARNING: deprecated) in 9.2.0
+ # _, _, w, h = self.font.getbbox(label) # text width, height (New)
outside = box[1] - h >= 0 # label fits outside box
self.draw.rectangle(
(box[0], box[1] - h if outside else box[1], box[0] + w + 1,
diff --git a/yolov5/utils/roboflow.py b/yolov5/utils/roboflow.py
index b243cd7..aa7d919 100644
--- a/yolov5/utils/roboflow.py
+++ b/yolov5/utils/roboflow.py
@@ -19,7 +19,7 @@ def extract_roboflow_metadata(url: str) -> tuple:
def resolve_roboflow_model_format(task: str) -> str:
task_format_mapping = {
- "detect": "yolov8",
+ "detect": "yolov5",
"segment": "yolov5",
"classify": "folder"
}
diff --git a/yolov5/utils/segment/dataloaders.py b/yolov5/utils/segment/dataloaders.py
index 9de6f0f..d66b361 100644
--- a/yolov5/utils/segment/dataloaders.py
+++ b/yolov5/utils/segment/dataloaders.py
@@ -37,7 +37,8 @@ def create_dataloader(path,
prefix='',
shuffle=False,
mask_downsample_ratio=1,
- overlap_mask=False):
+ overlap_mask=False,
+ seed=0):
if rect and shuffle:
LOGGER.warning('WARNING ⚠️ --rect is incompatible with DataLoader shuffle, setting shuffle=False')
shuffle = False
@@ -64,7 +65,7 @@ def create_dataloader(path,
sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
loader = DataLoader if image_weights else InfiniteDataLoader # only DataLoader allows for attribute updates
generator = torch.Generator()
- generator.manual_seed(6148914691236517205 + RANK)
+ generator.manual_seed(6148914691236517205 + seed + RANK)
return loader(
dataset,
batch_size=batch_size,
diff --git a/yolov5/val.py b/yolov5/val.py
index e8c6dd7..2b880f9 100644
--- a/yolov5/val.py
+++ b/yolov5/val.py
@@ -336,7 +336,7 @@ def run(
json.dump(jdict, f)
try: # https://github.com/cocodataset/cocoapi/blob/master/PythonAPI/pycocoEvalDemo.ipynb
- check_requirements('pycocotools')
+ check_requirements('pycocotools>=2.0.6')
from pycocotools.coco import COCO
from pycocotools.cocoeval import COCOeval
@@ -400,7 +400,7 @@ def parse_opt():
def main():
opt = parse_opt()
- #check_requirements(exclude=('tensorboard', 'thop'))
+ check_requirements(exclude=('tensorboard', 'thop'))
if opt.task in ('train', 'val', 'test'): # run normally
if opt.conf_thres > 0.001: # https://github.com/ultralytics/yolov5/issues/1466
diff --git a/yolov5/utils/loggers/wandb/wandb_utils.py b/yolov5/utils/loggers/wandb/wandb_utils.py
index 35485f4..17c4b00 100644
--- a/yolov5/utils/loggers/wandb/wandb_utils.py
+++ b/yolov5/utils/loggers/wandb/wandb_utils.py
@@ -17,7 +17,7 @@
from yolov5 import __version__
from yolov5.utils.dataloaders import LoadImagesAndLabels, img2label_paths
-from yolov5.utils.general import LOGGER, check_dataset, check_file
+from utils.general import LOGGER, check_dataset, check_file
try:
import wandb
diff --git a/yolov5/utils/metrics.py b/yolov5/utils/metrics.py
index 52c7919..ff6946a 100644
--- a/yolov5/utils/metrics.py
+++ b/yolov5/utils/metrics.py
@@ -208,7 +208,7 @@ def plot(self, normalize=True, save_dir='', names=()):
vmin=0.0,
xticklabels=ticklabels,
yticklabels=ticklabels).set_facecolor((1, 1, 1))
- ax.set_ylabel('True')
+ ax.set_xlabel('True')
ax.set_ylabel('Predicted')
ax.set_title('Confusion Matrix')
fig.savefig(Path(save_dir) / 'confusion_matrix.png', dpi=250)
diff --git a/yolov5/utils/plots.py b/yolov5/utils/plots.py
index fffa5bc..08a9c71 100644
--- a/yolov5/utils/plots.py
+++ b/yolov5/utils/plots.py
@@ -88,7 +88,8 @@ def box_label(self, box, label='', color=(128, 128, 128), txt_color=(255, 255, 2
if self.pil or not is_ascii(label):
self.draw.rectangle(box, width=self.lw, outline=color) # box
if label:
- w, h = self.font.getsize(label) # text width, height
+ w, h = self.font.getsize(label) # text width, height (WARNING: deprecated) in 9.2.0
+ # _, _, w, h = self.font.getbbox(label) # text width, height (New)
outside = box[1] - h >= 0 # label fits outside box
self.draw.rectangle(
(box[0], box[1] - h if outside else box[1], box[0] + w + 1,
diff --git a/yolov5/utils/roboflow.py b/yolov5/utils/roboflow.py
index b243cd7..aa7d919 100644
--- a/yolov5/utils/roboflow.py
+++ b/yolov5/utils/roboflow.py
@@ -19,7 +19,7 @@ def extract_roboflow_metadata(url: str) -> tuple:
def resolve_roboflow_model_format(task: str) -> str:
task_format_mapping = {
- "detect": "yolov8",
+ "detect": "yolov5",
"segment": "yolov5",
"classify": "folder"
}
diff --git a/yolov5/utils/segment/dataloaders.py b/yolov5/utils/segment/dataloaders.py
index 9de6f0f..d66b361 100644
--- a/yolov5/utils/segment/dataloaders.py
+++ b/yolov5/utils/segment/dataloaders.py
@@ -37,7 +37,8 @@ def create_dataloader(path,
prefix='',
shuffle=False,
mask_downsample_ratio=1,
- overlap_mask=False):
+ overlap_mask=False,
+ seed=0):
if rect and shuffle:
LOGGER.warning('WARNING ⚠️ --rect is incompatible with DataLoader shuffle, setting shuffle=False')
shuffle = False
@@ -64,7 +65,7 @@ def create_dataloader(path,
sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
loader = DataLoader if image_weights else InfiniteDataLoader # only DataLoader allows for attribute updates
generator = torch.Generator()
- generator.manual_seed(6148914691236517205 + RANK)
+ generator.manual_seed(6148914691236517205 + seed + RANK)
return loader(
dataset,
batch_size=batch_size,
diff --git a/yolov5/val.py b/yolov5/val.py
index e8c6dd7..2b880f9 100644
--- a/yolov5/val.py
+++ b/yolov5/val.py
@@ -336,7 +336,7 @@ def run(
json.dump(jdict, f)
try: # https://github.com/cocodataset/cocoapi/blob/master/PythonAPI/pycocoEvalDemo.ipynb
- check_requirements('pycocotools')
+ check_requirements('pycocotools>=2.0.6')
from pycocotools.coco import COCO
from pycocotools.cocoeval import COCOeval
@@ -400,7 +400,7 @@ def parse_opt():
def main():
opt = parse_opt()
- #check_requirements(exclude=('tensorboard', 'thop'))
+ check_requirements(exclude=('tensorboard', 'thop'))
if opt.task in ('train', 'val', 'test'): # run normally
if opt.conf_thres > 0.001: # https://github.com/ultralytics/yolov5/issues/1466