Energy-aware coverage controller
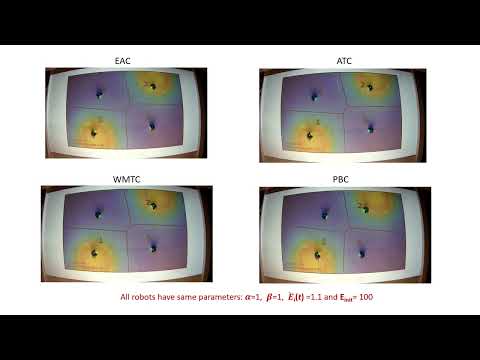
EAC takes into account both robots's energy consumption rate and available energy level. It dynamically adjusts the allocation of regions, assigning smaller areas to robots with lower energy levels or faster depletion rates, and vice versa. EAC seeks to extend the overall lifespan of the multi-robot system while optimizing the achievement of mission objectives.
Here's the preprint of the paper: https://arxiv.org/abs/2411.02230
Please cite it as: Munir, A., Dutta, A., & Parasuraman, R. (2024). Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System. arXiv preprint arXiv:2411.02230.
This work is accepted and presented at The International Symposium on Distributed Autonomous Robotic Systems (DARS) 2024, held in NY in Oct 2024.
Matlab *(Fast Bounded Power Diagram MATLAB Add-on is also required, but it's built into this repository under third-party utilities (tp-utility) folder; you don't need to install)
- Robotarium Matlab Installation
Place the repository within the "example" directory of Matlab Robotarium and execute the main script labeled as "EnergyAwareRobotarium.m."
You can set the following paramters in script:
- robots initial positions
- density source locations (u1,u2)
- threshold distance to centroid
- velocity
- density flag
- Aiman Munir - PhD Candidate, University of Georgia
- Dr. Ramviyas Parasuraman - Assistant Professor, University of Georgia
- Dr. Ayan Dutta - Associate Professor, University of North Florida
Heterogeneous Robotics Lab (HeRoLab), Department of Computer Science, University of Georgia. http://hero.uga.edu
For further information, contact Aiman Munir aiman.munir@uga.edu or Prof. Ramviyas Parasuraman ramviyas@uga.edu