This ROS package implements a state dependent LQR controller for high accuracy trajectory tracking. It was tested with PX4_SITL and Gazebo before being flown in an agile racing quad with a Raspberry Pi 3B companion computer.
Runs PX4, VRPN (VICON mocap), and relay pose data.
roslaunch lqr_controller mavros_vrpn.launch
Runs main controller and loads param.yaml file.
roslaunch lqr_controller lqr_euler.launch
Working on developing a learning algorithm for inflight thrust mapping. Strain gauges are attached to a quadrotor to collect thrust measurements in flight and how the mapping of normalized motor input [0,1] to thrust changes as a result of voltage decrement, ground effects, and propeller downwash.

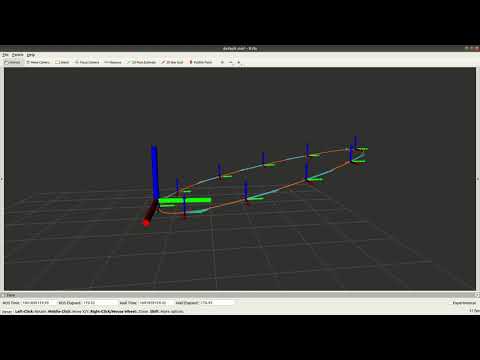

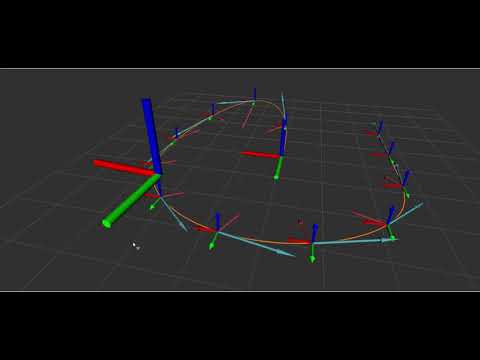
This state dependent LQR controller is an extension of [1] for euler angles and quaternions.
[1] Foehn, Philipp & Scaramuzza, Davide. (2018). Onboard State Dependent LQR for Agile Quadrotors. 10.1109/ICRA.2018.8460885.