Implementaion of Gaussian Process Recurrent Neural Networks (GP-RNN) developed in "Neural Dynamics Discovery via Gaussian Process Recurrent Neural Networks", Qi She, Anqi Wu, UAI2019
If you find this useful in your research, please consider citing:
@article{Qi2019Nerual,
title={Neural Dynamics Discovery via Gaussian Process Recurrent Neural Networks},
author={Qi She, Anqi Wu},
Conference={The Conference on Uncertainty in Artificial Intelligence (UAI), 2019},
year={2019}
}
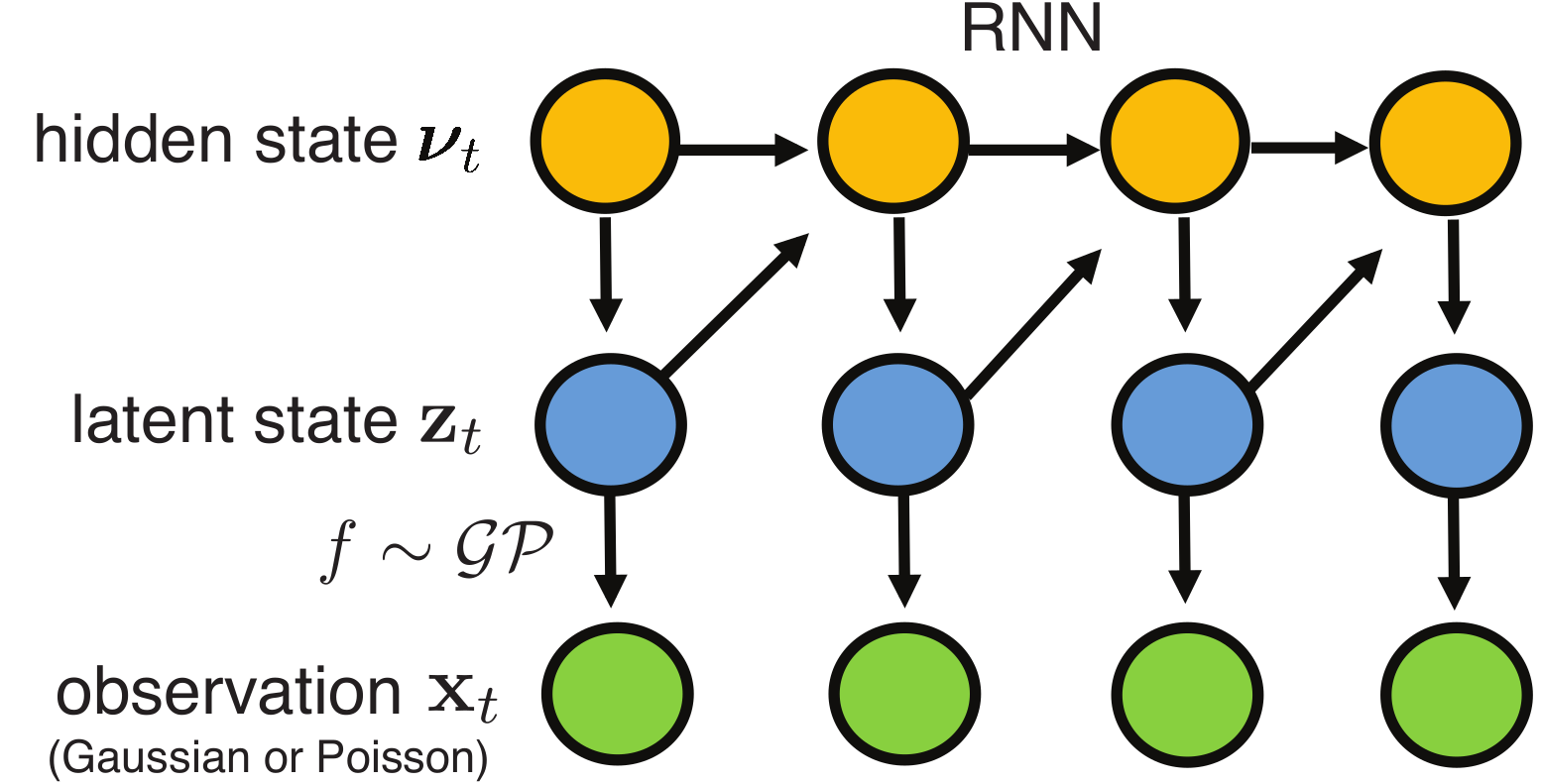
Latent dynamics discovery is challenging in extracting complex dynamics from high dimensional noisy neural data. we propose a novel latent dynamic model that is capable of capturing nonlinear, non-Markovian, long-short term time-dependent dynamics via recurrent neural networks and tackling complex nonlinear embedding via non-parametric Gaussian process. The model can be easily adapted to exploring latent representations of time series with either Gaussian (continuous) or Poisson (discrete) observations.
Our model composes RNN (e.g.LSTM) with hidden states (v) encoded in the prior distribution of latent states (z), and then maps to the noisy-free space of observations (x).
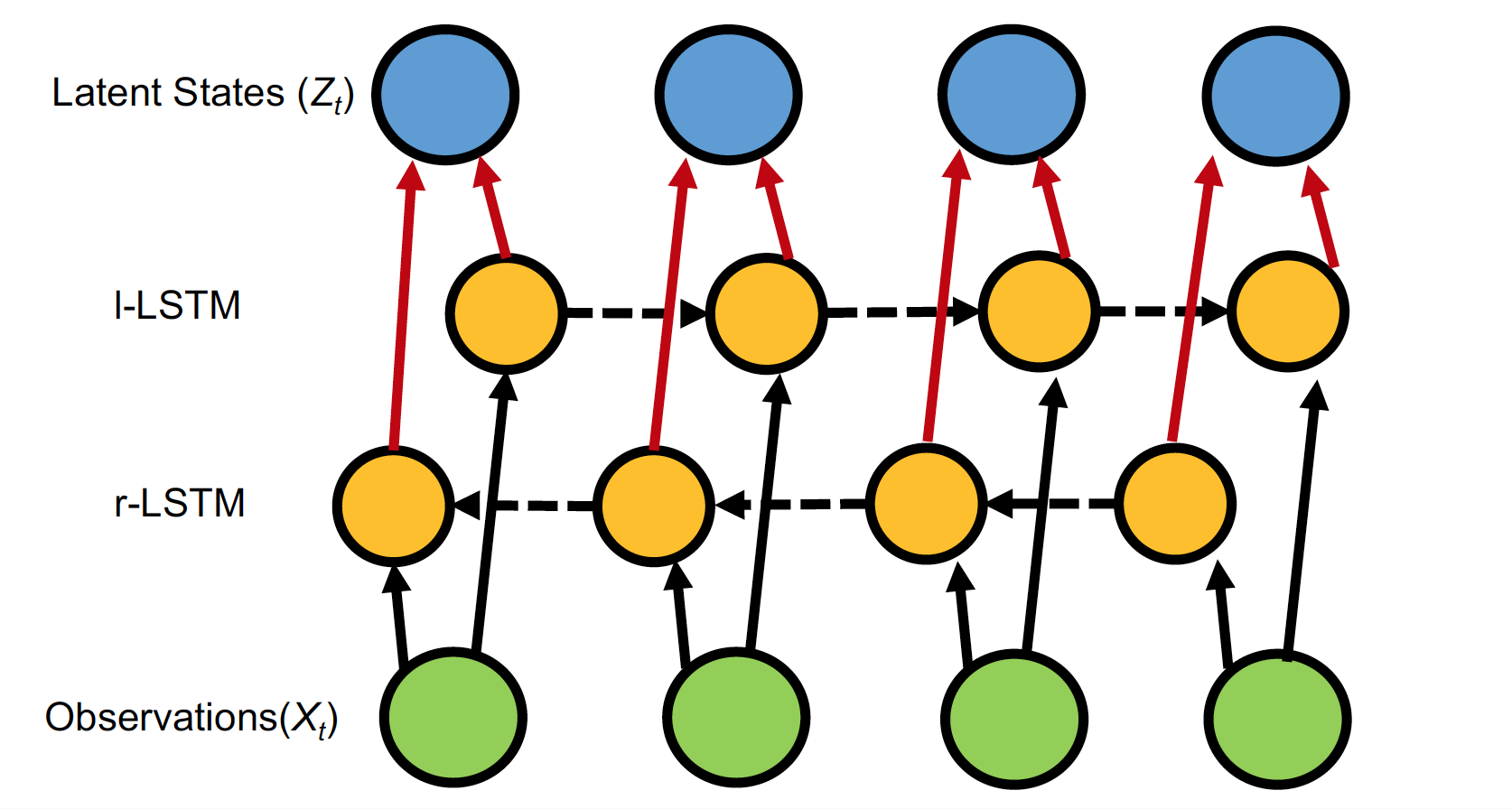
The inference methods are non-trivial with Gaussian and Poisson observations, one of powerful inference networks is bi-LSTM as shown below, please see the details in the paper.
- Ubuntu 16.04
- python3.6
- tensorflow-gpu 1.5.0 (cpu version is also compatible)
- CUDA9.0
- recommend install in virtual environment
$ conda create -n yourenvname python=3.6 anaconda
- Install the required the packages inside the virtual environment
$ source activate yourenvname
$ pip install -r requirements.txt
- please run jupyter lab to test attached demo.
Feel free to submit an issue to the repo and contact the corresponding author Qi She if you have any problem or would like to contribute.