This git is addition application git for Open Manipulator with turtlebot3.
Original Reference Code is
https://github.com/ROBOTIS-GIT/open_manipulator_with_tb3
*First you must set open manipulator and turtlebot3 environment and mobile manipulator
http://emanual.robotis.com/docs/en/platform/openmanipulator/
http://emanual.robotis.com/docs/en/platform/turtlebot3/overview/
*Sencond, download modifed git.
git clone https://github.com/AuTURBO/open_manipulator_with_tb3.git
git clone https://github.com/AuTURBO/open_manipulator_with_tb3_simulations.git *Third, set model waffle at ~/.bashrc file.
#export TURTLEBOT3_MODEL=burger
export TURTLEBOT3_MODEL=waffle
#export TURTLEBOT3_MODEL=waffle_pi$roscore
$roslaunch open_manipulator_with_tb3_gazebo open_manipulator_with_tb3_rooms1.launch
$roslaunch open_manipulator_with_tb3_description open_manipulator_with_tb3_model.launch use_gazebo:=true
!!!!! please push play button gazebo window.
$roslaunch open_manipulator_with_tb3_tools open_manipulator_with_tb3_controller1.launchClick image to link to YouTube video.

$roscore
$roslaunch open_manipulator_with_tb3_gazebo open_manipulator_with_tb3_rooms2.launch
$roslaunch open_manipulator_with_tb3_description open_manipulator_with_tb3_model.launch use_gazebo:=true
!!!!! please push play button gazebo window.
$roslaunch open_manipulator_with_tb3_tools open_manipulator_with_tb3_controller2.launchClick image to link to YouTube video.
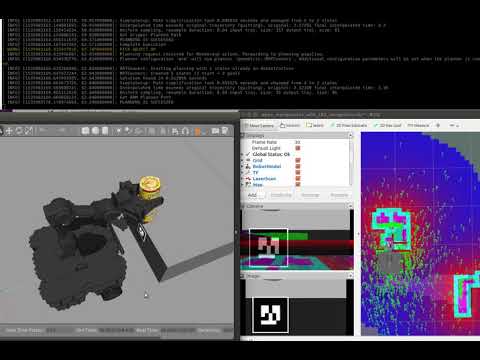
Room3 is a demo simulation that is objecti picking by 3D and 2D image processing.
The used algorithm is Darknet ROS ( YOLO3, Cuda ) , jsk_recognition , MoveIt , MoveBase and Gmapping.
refernce site is
https://github.com/ROBOTIS-GIT/open_manipulator_with_tb3
https://github.com/ROBOTIS-JAPAN-GIT/turtlebot3_slam_3d
- addition install packages
git clone https://github.com/hyunoklee/darknet_ros.git
git clone https://github.com/AuTURBO/turtlebot3_slam_3d
git clone https://github.com/jsk-ros-pkg/jsk_common.git
git clone https://github.com/jsk-ros-pkg/jsk_recognition.git
catkin_ws && catkin_make
sudo apt-get install ros-kinetic-jsk-recognition
sudo apt-get install ros-kinetic-libsiftfast
sudo apt-get install ros-kinetic-laser-assembler
sudo apt-get install ros-kinetic-octomap-server
sudo apt-get install ros-kinetic-nodelet
sudo apt-get install ros-kinetic-depth-image-proc
sudo apt-get install ros-kinetic-jsk-topic-tools
sudo apt-get install ros-kinetic-rtabmap-ros- run
$roscore
$roslaunch open_manipulator_with_tb3_gazebo open_manipulator_with_tb3_rooms3.launch
$roslaunch open_manipulator_with_tb3_description open_manipulator_with_tb3_model.launch use_gazebo:=true
!!!!! please push play button gazebo window.
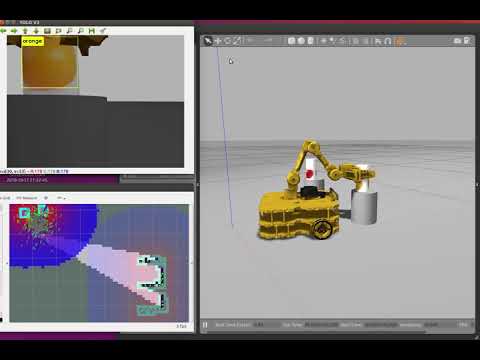
If you want that tb3 move orage to 3 point of shelf.
$roslaunch open_manipulator_with_tb3_tools open_manipulator_with_tb3_controller3.launch target_object:=orange place_position:=3
If you want that tb3 move apple to 0 point of shelf.
$roslaunch open_manipulator_with_tb3_tools open_manipulator_with_tb3_controller3.launch target_object:=apple place_position:=0 Point of Shelf

If you want that tb3 move orage to 3 point of shelf.
$roslaunch open_manipulator_with_tb3_tools open_manipulator_with_tb3_controller3.launch target_object:=orange place_position:=3
Click image to link to YouTube video.
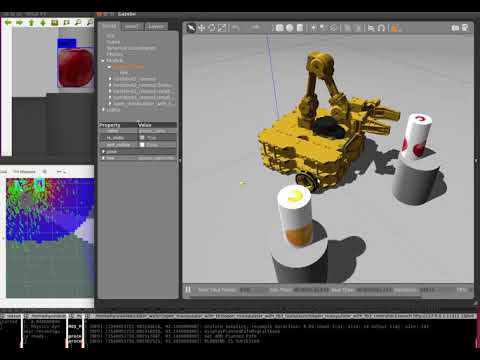
If you want that tb3 move apple to 0 point of shelf.
$roslaunch open_manipulator_with_tb3_tools open_manipulator_with_tb3_controller3.launch target_object:=apple place_position:=0
Click image to link to YouTube video.
This example is a room example to take picture for a Korean Thanksgiving card.
$roscore
$roslaunch open_manipulator_with_tb3_gazebo open_manipulator_with_tb3_rooms10.launch
!!!!! please push play button at gazebo .
$roslaunch open_manipulator_with_tb3_waffle_moveit demo2.launch use_gazebo:=true
-> control manipulator position
-> next please push stop button at gazebo window.
-> move turtlebot3 place where you want 

I add node to contorl open_manipulator_position_ctrl (arm_controller.cpp) by server and clinet.
$roscore
$roslaunch open_manipulator_with_tb3_gazebo open_manipulator_with_tb3_gazebo2.launch
$roslaunch open_manipulator_with_tb3_waffle_moveit demo2.launch use_gazebo:=true
$roslaunch open_manipulator_with_tb3_tools open_manipulator_with_tb3_getset.launch
$rostopic pub /getarm_position std_msgs/String "get_kinematics_pose" --once
$rostopic pub /getarm_position std_msgs/String "set_kinematics_pose" --once
$rostopic pub /getarm_position std_msgs/String "get_joint_pose" --once
$rostopic pub /getarm_position std_msgs/String "set_joint_pose" --once
## Etc
grep -rns "printf.*:" ./
grep -rns "printf.*%s.*:" ./