{kind=link}
This program demonstrates the use of the Intel RealSense Depth Camera to capture depth and color images, and process the data using various algorithms.
- Python 3.6+
- NumPy
- OpenCV
- PyQt5
- Matplotlib
- realsense2
- sklearn
- Connect the RealSense Depth Camera to the computer.
- Run the program using the command
python3 terrian_gui.py. - A gui will open
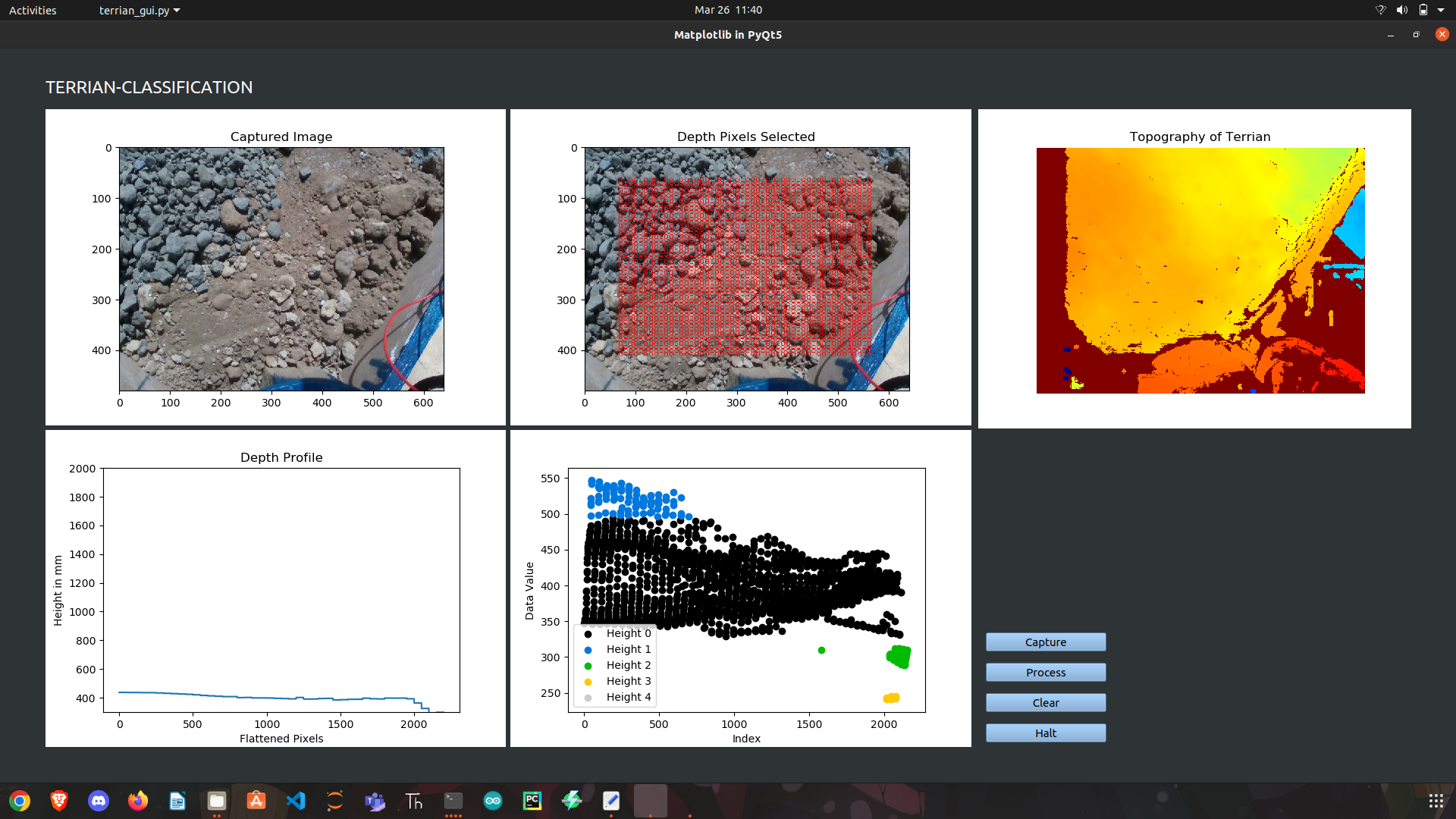
- Click on the "Capture" button to capture an image.
- Click on the "Process" button to process the captured image.
- Click on the "Clear" button to clear the display.
- Displays the captured image in a Matplotlib canvas.
- Creates a grid of pixels and extracts depth values from the corresponding locations in the depth image.
- Smooths the data using a moving average filter.
- Performs clustering on the data using DBSCAN algorithm.
- Displays the depth profile and cluster plot in Matplotlib canvases.
- Applies color mapping to the depth image for visualization.
This program is developed by Devanshu Sharma as a part of project at VIT, Vellore.It is based on the RealSense SDK and uses code snippets from various online sources.