



This is an Introductory Tutorial to the Fast-RTPS and Micro-RTPS protocols for RTPS (Real Time Publish Subscribe) as used in robotics and extremely constrained devices. The enablers of the FIWARE platform are not directly involved at this low level of communication but a complete understanding of the protocols is required before proceeding to connect robotic devices to the FIWARE System.
The tutorial introduces a series of exercises which can be run directly from within a Docker container, no HTTP calls are required.
- このチュートリアルは日本語でもご覧いただけます。
Details
eProsima Fast-RTPS is a C++ implementation of the RTPS (Real Time Publish Subscribe) protocol, which provides publisher-subscriber communications over unreliable transports such as UDP, as defined and maintained by the Object Management Group (OMG) consortium. RTPS is also the wire interoperability protocol defined for the Data Distribution Service (DDS) standard, again by the OMG. eProsima Fast RTPS holds the benefit of being standalone and up-to-date, as most vendor solutions either implement RTPS as a tool to implement DDS or use past versions of the specification.
Some of the main features of this library are:
- Configurable best-effort and reliable publish-subscribe communication policies for real-time applications.
- Plug and play connectivity so that any new applications are automatically discovered by any other members of the network.
- Modularity and scalability to allow continuous growth with complex and simple devices in the network.
- Configurable network behavior and interchangeable transport layer: Choose the best protocol and system input/output channel combination for each deployment.
- Two API Layers: a high-level Publisher-Subscriber one focused on usability and a lower-level Writer-Reader one that provides finer access to the inner workings of the RTPS protocol.
eProsima Fast RTPS has been adopted by multiple organizations in many sectors including these important cases:
- Robotics: ROS (Robotic Operating System) as their default middleware for ROS2.
- EU R&D: FIWARE Incubated GE.
eProsima Micro-RTPS protocols for RTPS (Real Time Publish Subscribe) as used in robotics and extremely constrained devices, which is a software solution that provides publisher-subscriber communication between eXtremely Resource Constrained Environments (XRCEs) and a DDS network. In particular, Micro-RTPS implements a client-server protocol to enable resource-constrained devices (clients) to take part in DDS communications. Micro-RTPS agent (server) enables possible this communication by acting behalf of Micro-RTPS clients and enabling them to take part as DDS publishers and/or subscribers in the DDS Global Data Space.
To keep things simple both components will be run using Docker. Docker is a container technology which allows to different components isolated into their respective environments.
- To install Docker on Windows follow the instructions here
- To install Docker on Mac follow the instructions here
- To install Docker on Linux follow the instructions here
Docker Compose is a tool for defining and running multi-container Docker applications. A YAML file is used configure the required services for the application. This means all container services can be brought up in a single command. Docker Compose is installed by default as part of Docker for Windows and Docker for Mac, however Linux users will need to follow the instructions found here
You can check your current Docker and Docker Compose versions using the following commands:
docker-compose -v
docker versionPlease ensure that you are using Docker version 18.03 or higher and Docker Compose 1.21 or higher and upgrade if necessary.
We will start up our services using a simple bash script. Windows users should download cygwin to provide a command-line functionality similar to a Linux distribution on Windows.
To start the installation, do the following:
git clone https://github.com/FIWARE/tutorials.Fast-RTPS-Micro-RTPS.git
cd tutorials.Fast-RTPS-Micro-RTPS
git checkout NGSI-v2
./services createNote The initial creation of Docker images can take up to fifteen minutes
Thereafter, all services can be initialized from the command-line by running the services Bash script provided within the repository:
./services startℹ️ Note: If you want to clean up and start over again you can do so with the following command:
./services stop
The goal of this section is to provide you with a simple getting started guide on how to install and use Fast-RTPS. In the subsequent tutorials we will discuss how Fast-RTPS (and therefore ROS2) can be connected to the Orion Context Broker using FIROS2.
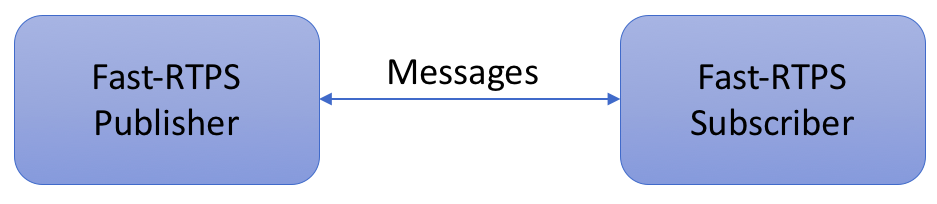
At this point, you have Fast-RTPS installed in the Docker container environment. We can now run a Hello World example. In the example, we will send a set of messages from a publisher to a subscriber using the Fast-RTPS protocol, as shown in the figure.
Open a new terminal and enter the running examples-fast-rtps Docker container with:
docker exec -ti examples-fast-rtps /bin/bashTo compile the example, do the usual:
cmake .
make
make installFirst we start a subscriber:
./HelloWorldExample subscriberThe Fast-RTPS Subscriber has started and is awaiting messages:
Starting
Subscriber running. Please press enter to stop the Subscriber
Open a second new terminal and enter the running examples-fast-rtps Docker container with:
docker exec -ti examples-fast-rtps /bin/bashThen we start the publisher in this second terminal:
./HelloWorldExample publisherThe messages should be automatically sent by the publisher and received by the subscriber. If everything is OK, in your publisher and subscriber terminals respectively you should see something like:
The Fast-RTPS Subscriber has received a series of messages:
Subscriber matched
Message HelloWorld 1 RECEIVED
Message HelloWorld 2 RECEIVED
Message HelloWorld 3 RECEIVED
Message HelloWorld 4 RECEIVED
Message HelloWorld 5 RECEIVED
Message HelloWorld 6 RECEIVED
Message HelloWorld 7 RECEIVED
Message HelloWorld 8 RECEIVED
Message HelloWorld 9 RECEIVED
Message HelloWorld 10 RECEIVED
Subscriber unmatched
The Fast-RTPS Publisher sends a series of messages:
Starting
Publisher matched
Message: HelloWorld with index: 1 SENT
Message: HelloWorld with index: 2 SENT
Message: HelloWorld with index: 3 SENT
Message: HelloWorld with index: 4 SENT
Message: HelloWorld with index: 5 SENT
Message: HelloWorld with index: 6 SENT
Message: HelloWorld with index: 7 SENT
Message: HelloWorld with index: 8 SENT
Message: HelloWorld with index: 9 SENT
Message: HelloWorld with index: 10 SENT
You can stop the Fast-RTPS Subscriber in the 1️⃣st terminal by pressing <enter>
To leave the containers and end interactive mode, run the following in each terminal.
exitYou will then return to the command-line.
Other examples are available in the examples folder, which are beyond the scope of this tutorial. For more
information, please refer to the
official Fast-RTPS documentation.
The goal of this section is to provide you with a simple getting started guide on how to install and use Micro-RTPS.
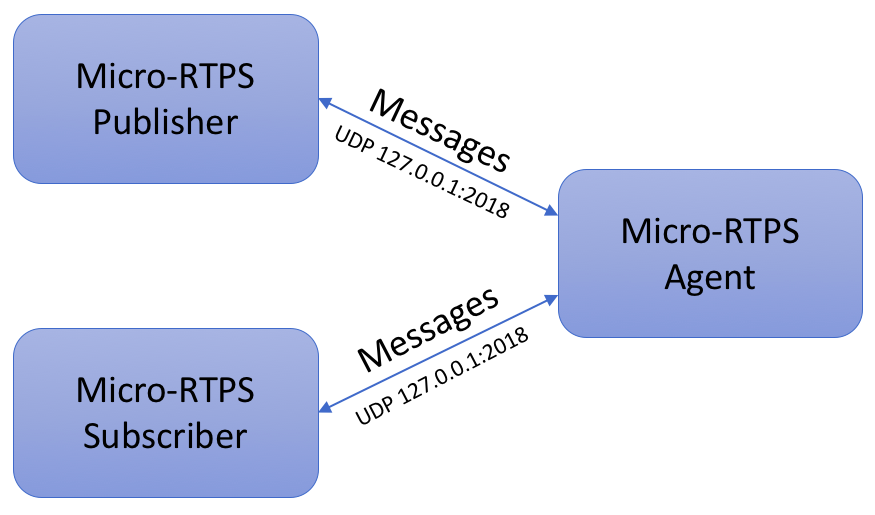
At this point, you have Micro-RTPS installed in the Docker container environment. We can now run a Hello World example. In the example, we will send a set of messages from a Micro-RTPS publisher to a Micro-RTPS subscriber through a Micro-RTPS agent, as shown in the figure.
Open a new terminal and enter the running examples-micro-rtps Docker container with:
docker exec -ti examples-micro-rtps /bin/bashWe first have to start the Micro-RTPS agent which will received messages sent by the Micro-RTPS publisher and forward
them to the subscriber. In order to do that, execute the following commands, which will result in the Micro-RTPS agent
being started on UDP port 2018:
cd /usr/local/bin
MicroRTPSAgent udp 2018The Micro-RTPS Agent is up and running
UDP agent initialization... OK
Running DDS-XRCE Agent...
Now we will need two more terminals in our Docker environment. In one of the terminals, we will start the Micro-RTPS publisher, while in the other we will start the subscriber. To open second and third terminals, open two bash terminals and in both of them run the following:
Open a second new terminal and enter the running examples-micro-rtps Docker container with:
docker exec -ti examples-micro-rtps /bin/bashWe start a subscriber as shown:
cd /usr/local/examples/micrortps/SubscribeHelloWorldClient/bin/
./SubscribeHelloWorldClient udp 127.0.0.1 2018The Micro-RTPS Subscriber is running and awaiting messages
<< UDP mode => ip: 127.0.0.1 - port: 2018 >>
Open a third new terminal and enter the running examples-micro-rtps Docker container with:
docker exec -ti examples-micro-rtps /bin/bashThen we start the publisher in the third terminal:
cd /usr/local/examples/micrortps/PublishHelloWorldClient/bin/
./PublishHelloWorldClient udp 127.0.0.1 2018The messages should be automatically sent by the publisher and received by the subscriber. If everything is OK, in your publisher and subscriber terminals respectively you should see something like:
The Micro-RTPS Agent has started receiving messages from the Publisher
UDP agent initialization... OK
Running DDS-XRCE Agent...
RTPS Publisher matched
...
The Micro-RTPS Subscriber has received the messages passed on by the Micro-RTPS Agent
<< UDP mode => ip: 127.0.0.1 - port: 2018 >>
Receive topic: Hello DDS world!, count: 1
Receive topic: Hello DDS world!, count: 2
Receive topic: Hello DDS world!, count: 3
Receive topic: Hello DDS world!, count: 4
Receive topic: Hello DDS world!, count: 5
Receive topic: Hello DDS world!, count: 6
Receive topic: Hello DDS world!, count: 7
Receive topic: Hello DDS world!, count: 8
...
The Micro-RTPS Publisher has sent a series of messages as shown:
<< UDP mode => ip: 127.0.0.1 - port: 2018 >>
Send topic: Hello DDS world!, count: 1
Send topic: Hello DDS world!, count: 2
Send topic: Hello DDS world!, count: 3
Send topic: Hello DDS world!, count: 4
Send topic: Hello DDS world!, count: 5
Send topic: Hello DDS world!, count: 6
Send topic: Hello DDS world!, count: 7
Send topic: Hello DDS world!, count: 8
...
To leave the containers and end interactive mode, run the following:
exitYou will then return to the command-line.
Other examples are available in the examples folder, which are beyond the scope of this tutorial. For more information, please refer to the official Micro-RTPS documentation.
Want to learn how to add more complexity to your application by adding advanced features? You can find out by reading the other tutorials in this series
MIT © 2018-2020 FIWARE Foundation e.V.