一个实现了多种最短路径搜索算法的代码库,包括主流的Dijkstra及其变种,以及多种最短路径索引算法
- 经典Dijkstra
- 使用堆优化的Dijkstra
- A* 算法 (使用欧式距离作为启发函数)
- G Tree算法 (使用multi graph partition 作为子图划分解决方案)
- (我还在写 没写完 没时间搞这个啦)
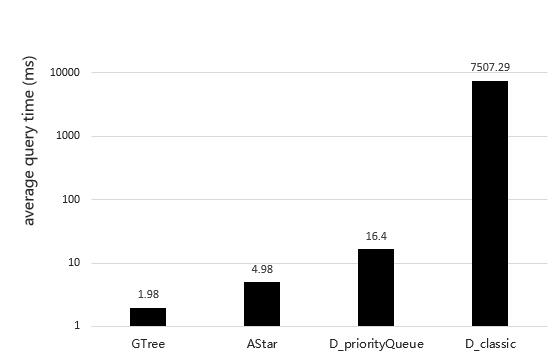
下图是在california路网(21,048个node)上随机进行100条最短路径查询的查询平均耗时.
数据集描述:路网数据集为文本文件(dataset/map_XXXX/edge.txt),且为边集数组的形式进行存储,格式为:
节点A的ID 节点B的ID A与B相连边的距离
举例如下:
0 1 0.002025
0 6 0.005952
1 2 0.01435
2 3 0.012279
3 4 0.011099
5 6 0.006157
5 7 0.001408
5 8 0.012008
7 265 0.003213
8 298 0.005382
9 10 0.01294
如果使用A* 算法,还需要路网的经纬度数据集文件(dataset/map_XXXX/lonlat.txt),默认北纬,所以不用加N,格式如下:
节点ID 经度(longitude) 纬度(latitude)
举例如下:
0 -121.904167 41.974556
1 -121.902153 41.974766
2 -121.896790 41.988075
3 -121.889603 41.998032
4 -121.886681 42.008739
5 -121.915062 41.970314
6 -121.910088 41.973942
7 -121.916199 41.969482
8 -121.903198 41.968456
9 -122.553284 41.895241
10 -122.542992 41.903084
Shortest_Distance_Algorithms/
│ main.cpp # 主函数入口
│ CMakeLists.txt # 如果你使用cmake进行编译,编辑它
│ README.md # 也就是本文件
|─ cbuild/ # 如果你用cmake进行编译,建议cbuild目录在这里
| |
│─ dataset/ # 存放路网数据集
│ │─ map_california/
│ │ | category.txt # 节点的类型(POI)
│ │ | distance.txt # 预计算的点到点的最短距离,方便在多次构建同一个路网给G Tree的时候省去最短路径计算的过程
│ │ | edge.txt # 路网的边
│ │ | lonlat.txt # 路网的点的经纬度
│ │─ map_maine/
│ │ | category.txt
│ │ | distance.txt
│ │ | edge.txt
│ │ | lonlat.txt
│ │─ map_mississippi/
│ │ | category.txt
│ │ | distance.txt
│ │ | edge.txt
│ │ | lonlat.txt
│ │─ map_NA/
│ │ | category.txt
│ │ | distance.txt
│ │ | edge.txt
│ │ | lonlat.txt
│ │─ map_OL/
│ │ | category.txt
│ │ | distance.txt
│ │ | edge.txt
│ │ | lonlat.txt
│ │─ map_SF/
│ │ | category.txt
│ │ | distance.txt
│ │ | edge.txt
│ │ | lonlat.txt
│ │─ map_test/
│ │ | category.txt
│ │ | distance.txt
│ │ | edge.txt
│ │ | lonlat.txt
│ │─ map_TG/
│ │ | category.txt
│ │ | distance.txt
│ │ | edge.txt
│ │ | lonlat.txt
│─ algorithms/
│ Graph.cpp
│ Graph.h
│ Dijkstra.cpp
│ Dijkstra.h
│ GraphPartition.h
│ GraphPartition.cpp
│ GTree.h
│ GTree.cpp
│ configure.h # 参数配置文件 主要存放当前使用的路网数据集的路径
│ A_Star.h
│ A_Star.cpp
你需要将algorithm文件夹拷贝到你的项目main代码同一目录下。其中,graph.cpp和graph.h是读取路网文件的工具,以及路网数据结构的定义。 你可以选择
- 将路径文件放到dataset文件夹中,然后使用Graph类实例化路网对象,使用该对象实例化Dijkstra等算法类对象。
- 将你自己的路网数据结构传入Dijkstra等算法类的构造函数中进行初始化,不过你需要将你的路网构建成Graph类,或者对Dijkstra等算法类做一些席细微的调整(这并不多,主要是获取邻接节点和路网大小等地方需要调整)