


*** THE REPO IS UNDER CONSTRUCTION - SHOULD BE DONE JULY 4th, 2023 ***
Control an FPGA via a Raspberry Pi and a web server.
Table of Contents
- TRY IT
- OVERVIEW
- SOFTWARE/HARDWARE STACK
- SECTION I - THE FPGA
- SECTION II - THE BREADBOARD
- SECTION III - THE RASPBERRY PI
- SECTION IV - THE WEB SERVER
- SECTION V - THE BROWSER
Documentation and Reference
- Try it here
- I burned my programable 8-bit microprocessor to an FPGA
- The control-fpga-via-raspi-and-webserver docker image at dockerhub
- raspi-gpio is an example of controlling the GPIO (Input/Output) on the Raspberry Pi using go
- This repos github webpage built with concourse
I burned my programable 8-bit microprocessor to an FPGA development board and you can control it at jeffdecola.com/control-an-fpga._
This project is separated into 5 main sections,
- I The FPGA (Digilent ARTY S7-50)
- II The BREADBOARD
- III The BACKEND SERVER (Raspberry Pi 4B)
- IV The WEB SERVER (Bluehost)
- V The BROWSER
This may help,

- SECTION I - The FPGA
- SECTION II - The Breadboard
- Connectors, resistors and wires
- SECTION III - The Backend Server
- SECTION IV - The Web Server
- php
- bluehost
- SECTION V - The Browser
- js
- html
- css
Summary,
- I designed my programable 8-bit microprocessor in Verilog (An HDL language)
- I used the Xilinx Vivado IDE to synthesize and burn/flash the FPGA
- I used the Digilent ARTY-S7 FPGA development board
I designed a programable 8-bit microprocessor in verilog and burned to an FPGA. Refer to that repo on how I accomplished this.
This is the high level architecture of the 8-bit microprocessor I designed in verilog,
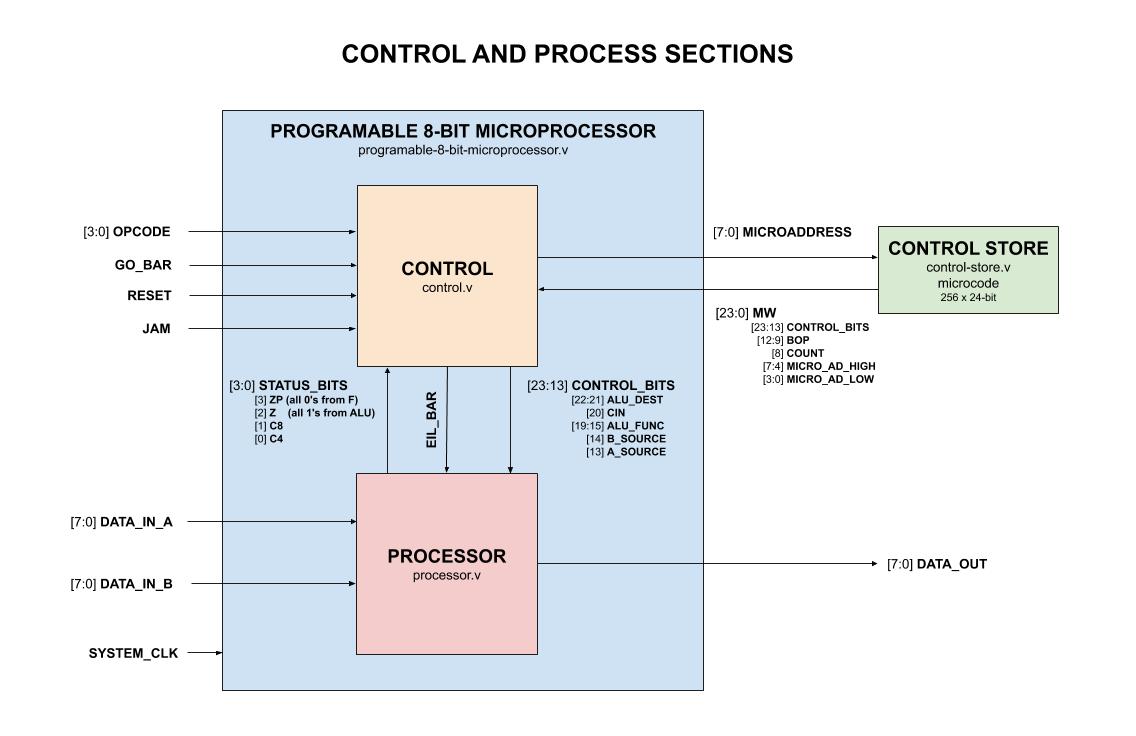
- INPUT
- SYSTEM_CLK
- [3:0] OPCODE
- GO_BAR
- RESET
- JAM
- [7:0] DATA_IN_A
- [7:0] DATA_IN_B
- OUTPUT
- [7:0] DATA_OUT
I burned the microprocessor to an FPGA on an Arty S7-50 FPGA development board.
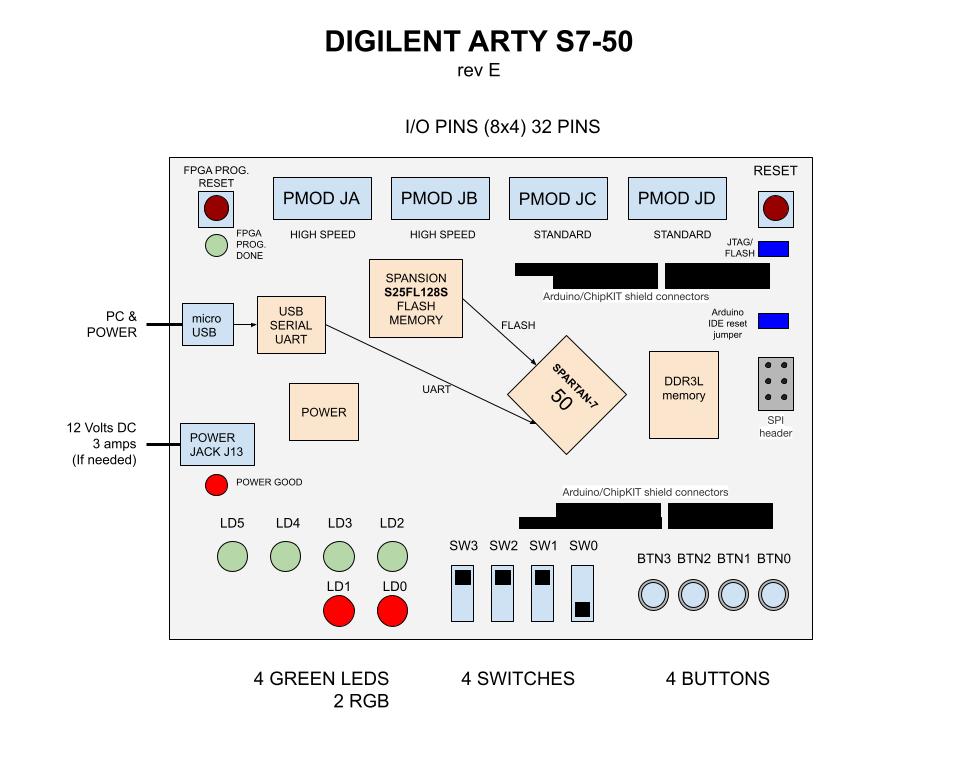
The FPGA is connected to the Raspberry Pi via the PMOD pins.
To connect the Raspberry Pi to the FPGA dev board, I used a breadboard. I connected the GPIO pins on the Raspberry Pi 4B to the PMOD pins on the FPGA development board.
There are a total of 31 pins used by the microprocessor, but there are only 28 GPIO pins. Hence, I tied 3 of the DATA_IN_A pins to gnd.
The pin list between the Raspberry Pi and the FPGA development board is as follows,
| PMOD Pins | RasPi GPIO Pin | |
|---|---|---|
| [7:0] DATA_IN_A | JA PMOD | |
| [7] | 1 | 18 (GPIO24) |
| (GND) [6] | 2 | N/C |
| (GND) [5] | 3 | N/C |
| (GND) [4] | 4 | N/C |
| [3] | 7 | 16 (GPIO23) |
| [2] | 8 | 12 (GPIO18) |
| [1] | 9 | 10 (GPIO15)* |
| [0] | 10 | 08 (GPIO14)* |
| [7:0] DATA_IN_B | JB PMOD | |
| [7] | 1 | 37 (GPIO26) |
| [6] | 2 | 40 (GPIO21) |
| [5] | 3 | 38 (GPIO20) |
| [4] | 4 | 36 (GPIO16) |
| [3] | 7 | 32 (GPIO12) |
| [2] | 8 | 26 (GPIO7) |
| [1] | 9 | 24 (GPIO8) |
| [0] | 10 | 22 (GPIO25) |
| [7:0] DATA_OUT | JC PMOD | |
| [7] | 1 | 15 (GPIO22) |
| [6] | 2 | 19 (GPIO10) |
| [5] | 3 | 21 (GPIO9) |
| [4] | 4 | 23 (GPIO11) |
| [3] | 7 | 29 (GPIO5) |
| [2] | 8 | 31 (GPIO6) |
| [1] | 9 | 33 (GPIO13) |
| [0] | 10 | 35 (GPIO19) |
| [3:0] OPCODE | JD PMOD | |
| [3] | 1 | 03 (GPIO2)** |
| [2] | 2 | 05 (GPIO3)** |
| [1] | 3 | 07 (GPIO4) |
| [0] | 4 | 11 (GPIO17) |
| GO | 7 | 13 (GPIO27) |
| RESET | 8 | 27 (GPIO0) |
| JAM | 9 | 28 (GPIO1) |
| N/C | 10 | N/C |
NOTE1: To use pin 8 (GPIO14) and pin 10 (GPIO15)
you must disable the serial port using raspi-config.
Select Interfacing Options and then
Serial and select No.
NOTE2 Pin 3 (GPIO2) and pin 5 (GPIO3) have fixed pull-up resistors to 3.3V.

The result,


The Raspberry Pi has two main functions,
- AS A CLIENT - Controls 28 pins of the I/O of the FPGA (GPIO to PMOD) via GO
- AS A SERVER - Provide an interface to the webserver (gRPC)
The Raspberry Pi will control the I/O of the FPGA via the GPIO pins. The Raspberry Pi will be the client and the FPGA will be the server.
The Raspberry Pi will control the FPGA via GO using the periph.io go package.
Init Raspberry Pi,
// INIT HOST MACHINE (i.e. Raspberry Pi)
_, err := host.Init()
if err != nil {
log.Fatal(err)
}For inputs,
// DATA_IN_A -----------------------------------
DATA_IN_A7_PIN := gpioreg.ByName("24")
if DATA_IN_A7_PIN == nil {
log.Fatal("Failed to find DATA_IN_A7_PIN")
}For outputs also set the pulldown resistor,
// DATA_OUT -----------------------------------
DATA_OUT_7_PIN := gpioreg.ByName("22")
if DATA_OUT_7_PIN == nil {
log.Fatal("Failed to find DATA_OUT_7_PIN")
}
// SET PULLDOWN RESISTER AND LOOK FOR BOTH EDGES (High->Low or Low->High)
err = DATA_OUT_7_PIN.In(gpio.PullDown, gpio.BothEdges)
if err != nil {
log.Fatal(err)
}The Raspberry Pi will also be a server using gRPC. It will accept requests from a web server client and return the results.
tbd
A go program will interface with both the FPGA and web server. It will placed in a docker image and deployed to a Raspberry Pi 4B.
To run.sh,
cd section-2-backend-server
go run main.goCurrently, it will ask you if you want to add, subtract, multiply or divide. It will look like,
1: add, 2: subtract, 3: multiply, 4: divide, x: exit: 1
ADD
DATA_IN_A: 10000011
DATA_IN_B: 00001100
DATA_OUT: 10001111 To create-binary.sh,
cd section-2-backend-server/bin
go build -o control-fpga-via-raspi-and-webserver ../main.go
./control-fpga-via-raspi-and-webserverThis binary will not be used during a docker build since it creates it's own.
To create unit _test files,
cd section-2-backend-server
gotests -w -all main.goTo run unit-tests.sh,
go test -cover ./... | tee test/test_coverage.txt
cat test/test_coverage.txtTo build.sh with a Dockerfile,
The Dockerfile has the architecture as arm64,
FROM --platform=linux/arm64 golang:alpine AS builderYou may have to get some libraries,
sudo apt-get install -y qemu qemu-user-static
docker buildx lscd section-2-backend-server
docker build --output type=docker\
--platform=linux/arm64\
--no-cache\
-f build/Dockerfile\
-t jeffdecola/control-fpga-via-raspi-and-webserver .If you are on an ARM64, you can check and test this docker image,
docker images jeffdecola/control-fpga-via-raspi-and-webserver:latest
docker run --privileged\
--name control-fpga-via-raspi-and-webserver\
-dit jeffdecola/control-fpga-via-raspi-and-webserverWrite stdin,
echo '1' | socat EXEC:"docker attach control-fpga-via-raspi-and-webserver",pty STDINCheck stdout,
docker logs control-fpga-via-raspi-and-webserverOther commands,
docker exec -i -t control-fpga-via-raspi-and-webserver /bin/bash
docker rm -f control-fpga-via-raspi-and-webserverIn stage 1, rather than copy a binary into a docker image (because that can cause issues), the Dockerfile will build the binary in the docker image,
FROM golang:alpine AS builder
RUN go get -d -v
RUN go build -o /go/bin/control-fpga-via-raspi-and-webserver main.goIn stage 2, the Dockerfile will copy the binary created in
stage 1 and place into a smaller docker base image based
on alpine, which is around 13MB.
You must be logged in to DockerHub,
docker loginTo push.sh,
docker push jeffdecola/control-fpga-via-raspi-and-webserverCheck the control-fpga-via-raspi-and-webserver docker image at DockerHub.
To deploy.sh,
cd section-2-backend-server
docker run --privileged\
--pull=always\
--name control-fpga-via-raspi-and-webserver\
-dit jeffdecola/control-fpga-via-raspi-and-webserverUsing --privileged allows complete access to raspberry pi.
If doing it over the network, you can do something like,
ssh -o StrictHostKeyChecking=no\
-p 22 jeff@192.168.20.118\
'export PATH=$PATH:/usr/local/bin; docker run --privileged --pull=always --name control-fpga-via-raspi-and-webserver -dit jeffdecola/control-fpga-via-raspi-and-webserver'The docker container is running on your raspberry pi. As mentioned above, the user may interact with the stdin and stdout of the docker container by,
Write stdin,
echo '1' | socat EXEC:"docker attach control-fpga-via-raspi-and-webserver",pty STDINCheck stdout,
docker logs control-fpga-via-raspi-and-webserverRefer to ci-README.md on how I automated the above steps.
The web server has two main functions,
- AS A CLIENT - It will also receive data from the Raspberry Pi via gRPC
- AS A SERVER - It will handle a request from the browser
tbd
php is used to handle the ajax XHR POST call request from the browser.
This is a high level overview of the process,
// GET THE JSON DATA FROM THE USER
header("Content-Type: application/json");
$attributesJSON = json_decode(file_get_contents("php://input"));
// UN PARSE IT
$opcode = $attributesJSON->opcode;
$data_in_a = $attributesJSON->data_in_a;
$data_in_b = $attributesJSON->data_in_b;
$go = $attributesJSON->go;
// DO SOMETHING - THIS IS WHERE YOU WOULD SEND DATA TO THE FPGA
...
// BUILD ARRAY
$array = [
'data_out'=>$data_out,
];
// SEND RESPONSE TO THE BROWSER
echo json_encode($array);I have a working demo at jeffdecola.com/control-an-fpga.
To connect with the webserver, I'm using javascript client side programming. It will send a ajax XHR POST call to the web server.
On the browser side using javascript, an ajax XHR POST call is made to the web server,
// PHP FILE LOCATION
var url = 'path to file/filename.php';
// CREATE A NEW REQUEST
postRequest = new XMLHttpRequest();
// CONVERT JSON TO STRING
var attributesJSONString = JSON.stringify({
"opcode": opcode,
"data_in_a": data_in_a,
"data_in_b": data_in_b,
"go": go
});
// OPEN CONNECTION - CREATE POST REQUEST
postRequest.open 'POST' , url, true);
// SEND JSON FORMAT
postRequest.setRequestHeader('Content-Type', 'application/json');
postRequest.send(attributesJSONString);
// LISTEN AND KICK OFF FUNCTION WHEN READY
postRequest.onreadystatechange = function() {
...see code...
}The end result jeffdecola.com/control-an-fpga looks as follows,
