In this tutorial you will learn how to import the Argo BDI-agent Architecture in a JaCaMo project and execute a Blink Project (hello world).
-
JaCaMo Framework already installed.
-
An IoT device using a serial communication channel, programmed using the Javino Blink Example.
Arduino SimulIDE 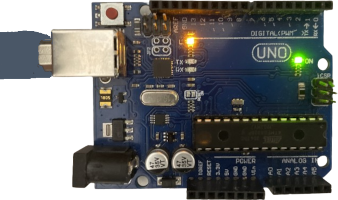
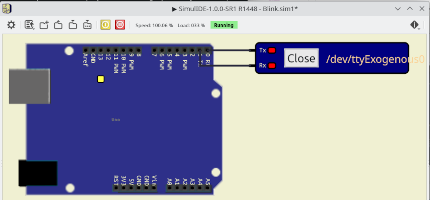
Blink tutorial with Arduino Board Blink tutorial with SimulIDE
-
In a terminal command, create a Multiagent System Project, using the command below:
jacamo app create jacamoWithArgo --console -
Include the Argo Package in the JaCaMo Project. Edit the project file jacamoWithArgo/jacamoWithArgo.jcm as follows:
mas jacamoWithArgo { agent bob: sample_agent.asl { ag-arch: jason.Argo } uses package: argo "com.github.chon-group:Argo:+" } -
Change the file jacamoWithArgo/src/agt/sample_agent.asl including the content below:
/* Initial beliefs and rules */ serialPort(ttyACM0). /* physical Arduino Board in /dev/ttyACM0 */ //serialPort(ttyUSB0). /* physical Arduino Board in /dev/ttyUSB0 */ //serialPort(ttyEmulatedPort0). /* simulated arduino with simulIDE */ /* Initial goals */ !start. /* Plans */ +!start: serialPort(Port) <- .print("Ah, Mr. Anderson, I see you are as predictable in this world as you are in the other."); .argo.port(Port); .argo.percepts(open). +ledStatus(on) <- .print("Turning ON the Led in Arduino!"); .argo.act(ledOff). +ledStatus(off) <- .print("Turning OFF the Led in Arduino!"); .argo.act(ledOn). +port(Port,Status): Status = off | Status = timeout <- .argo.percepts(close); .print("It's not over, Mr. Anderson! It's not over!"). -
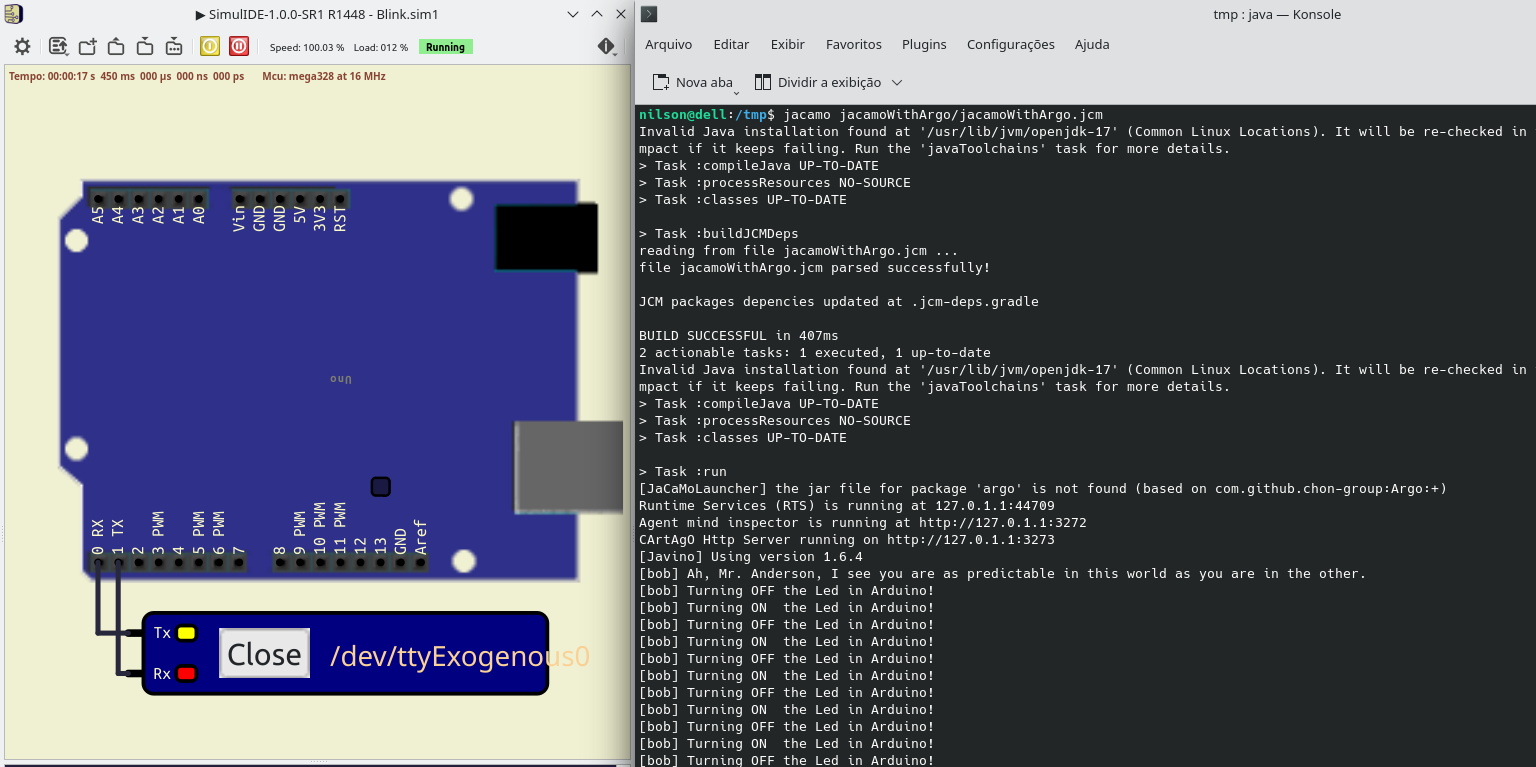
Execute the Multiagent System
jacamo jacamoWithArgo/jacamoWithArgo.mas2j
See the Argo Wiki Page
The Argo Jacamo Package is licensed under a Creative Commons Attribution 4.0 International License. The licensor cannot revoke these freedoms as long as you follow the license terms:

- Attribution — You must give appropriate credit like below:
Lazarin, N.M., Pantoja, C.E., Viterbo, J. (2024). Dealing with the Unpredictability of Physical Resources in Real-World Multi-agent Systems. In: Rocha, A.P., Steels, L., van den Herik, J. (eds) Agents and Artificial Intelligence. ICAART 2023. Lecture Notes in Computer Science(), vol 14546. Springer, Cham. https://doi.org/10.1007/978-3-031-55326-4_3
BibTeX Citation
@InProceedings{argoJCMPackage,
doi="10.1007/978-3-031-55326-4_3"
author="Lazarin, Nilson Mori
and Pantoja, Carlos Eduardo
and Viterbo, Jos{\'e}",
editor="Rocha, Ana Paula
and Steels, Luc
and van den Herik, Jaap",
title="Dealing with the Unpredictability of Physical Resources in Real-World Multi-agent Systems",
booktitle="Agents and Artificial Intelligence",
year="2024",
publisher="Springer Nature Switzerland",
address="Cham",
pages="48--71",
isbn="978-3-031-55326-4"
}