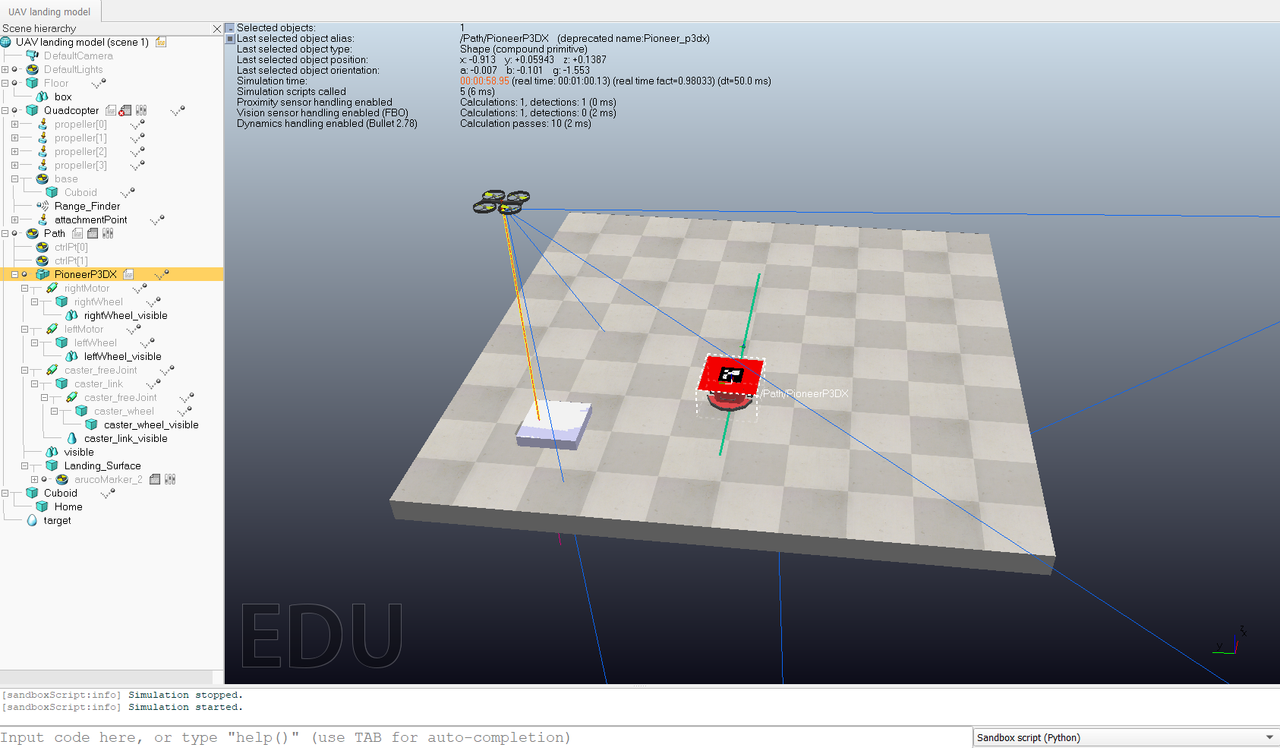
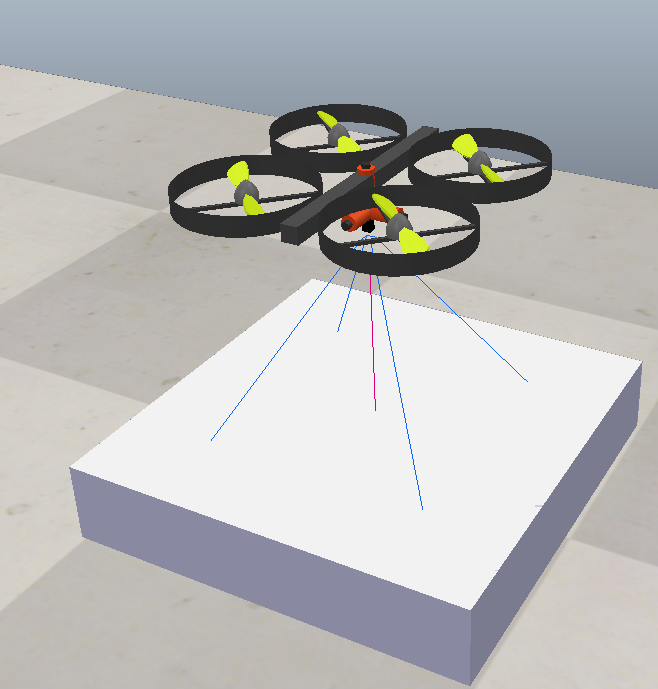
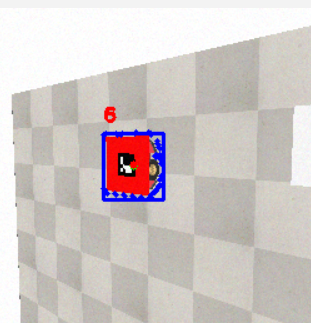
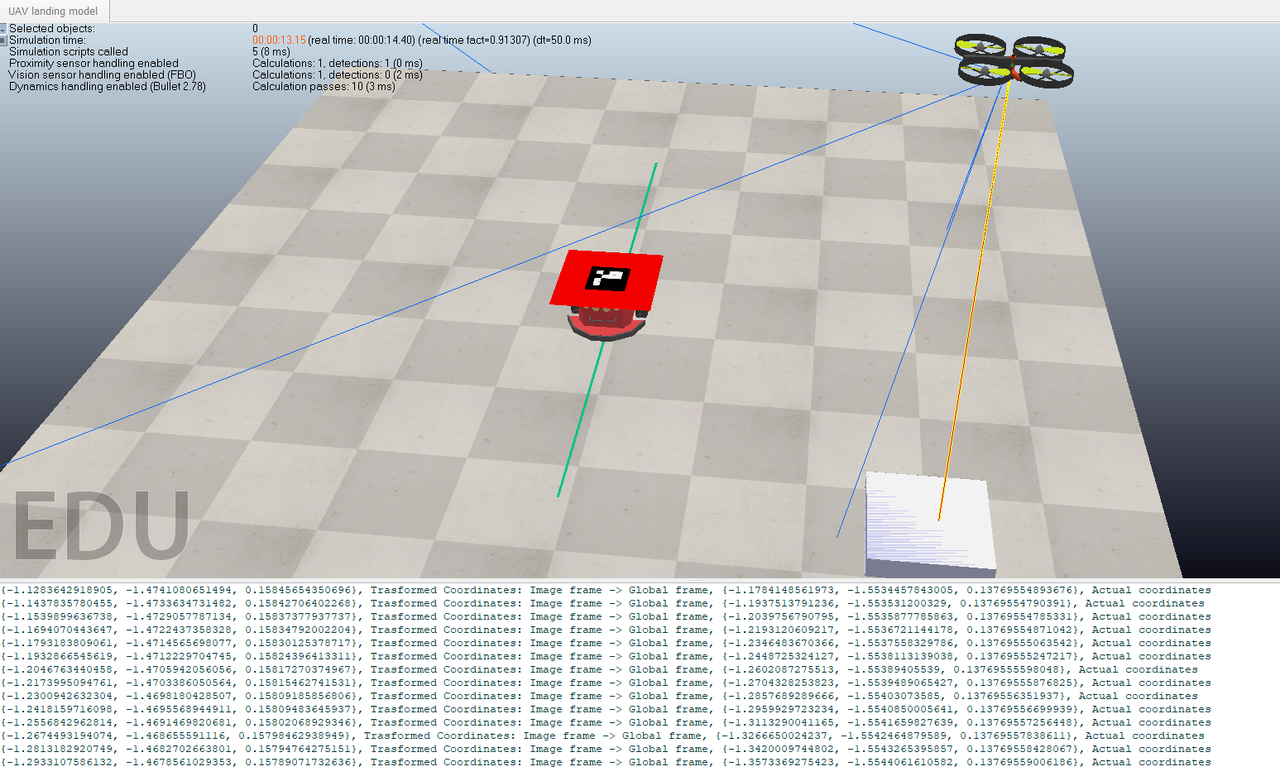
This is a simulation of autonomous landing system for a UAV on a slow-moving target, handling target search, heading angle estimation, target state estimation, and velocity control without human intervention or communication with the landing marker. The simulation was developed using CoppeliaSim and Python. The UAV and landing marker operate independently. This approach ensures the UAV can land accurately even on a moving target.
In order to run the simulation, install CoppeliaSim EDU. CoppeliaSim is a robot simulator software developed by Coppelia Robotics. It is freely available for academic use.
Open your terminal and install the following libraries :
pip install cbor2 numpy opencv-python scikit-image pykalman
Ensure that both the python code folder and the CoppeliaSim folder are in the SAME folder.
Now, open the test.py file and the UAV landing model.ttt file. Run the test.py file. The simulation should start running automatically.
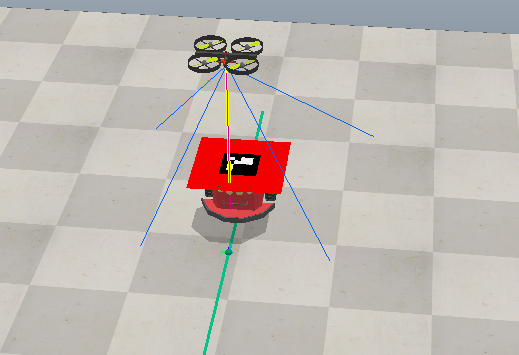
Pictures from the simulation -