- Members
- Thushara K A R :: E/16/369 :: e16369@eng.pdn.ac.lk
- Thilakarathna D M D U :: E/16/366 :: e16366@eng.pdn.ac.lk
- Dissanayake D M T H :: E/16/088 :: e16088@eng.pdn.ac.lk
- Supervisor
- Dr. Isuru Navinna
- Mr. Ziyan Marikkar
- Prof. Roshan Ragel
- Dr. Upul Jayasinghe
- Related links
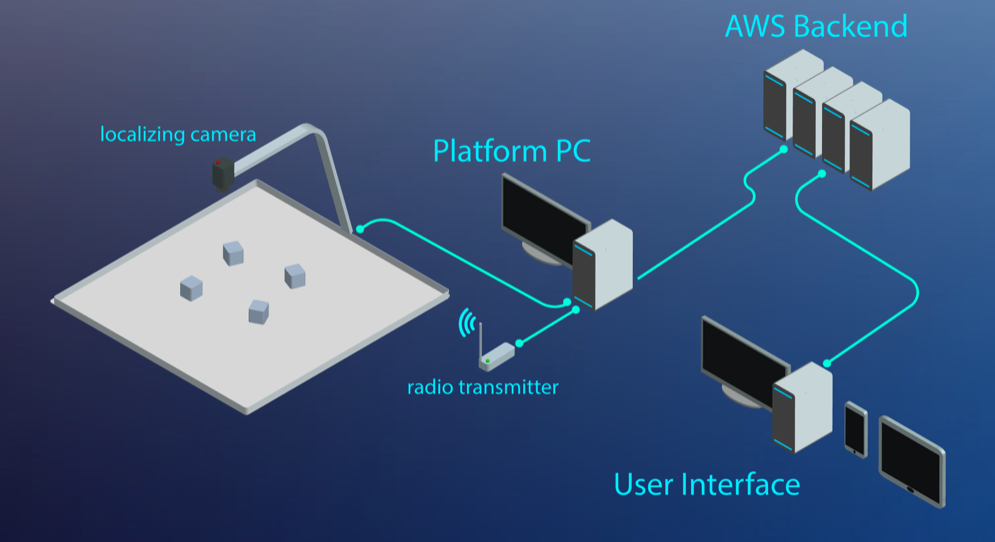
In swarm robotics the major barrier is that the researchers have to do a lot of hardware implementation prior to their projects. In this particular project we are going to come up with obstacle bots for a swarm robotic arena which is a part of a swarm robots platform project which eventually solves the above mentioned problem.
-
Automated obstacle bots monitored by an overhead camera setup.
-
Bots can move to the desired positions with a user friendly interface.
-
Obstacle robot swarm is capable of moving every individual obstacle robot to their own destination with the consideration of collision avoidance.
-
With the help of collision avoidance algorithms, obstacle robots can be placed in certain positions which allows the researcher to make various obstacle shapes on the arena made out of obstacle robot combinations .
-
Obstacles can be programmed to be static or dynamic. Dynamic obstacles can model scenarios that have a motion in the obstacle.
-
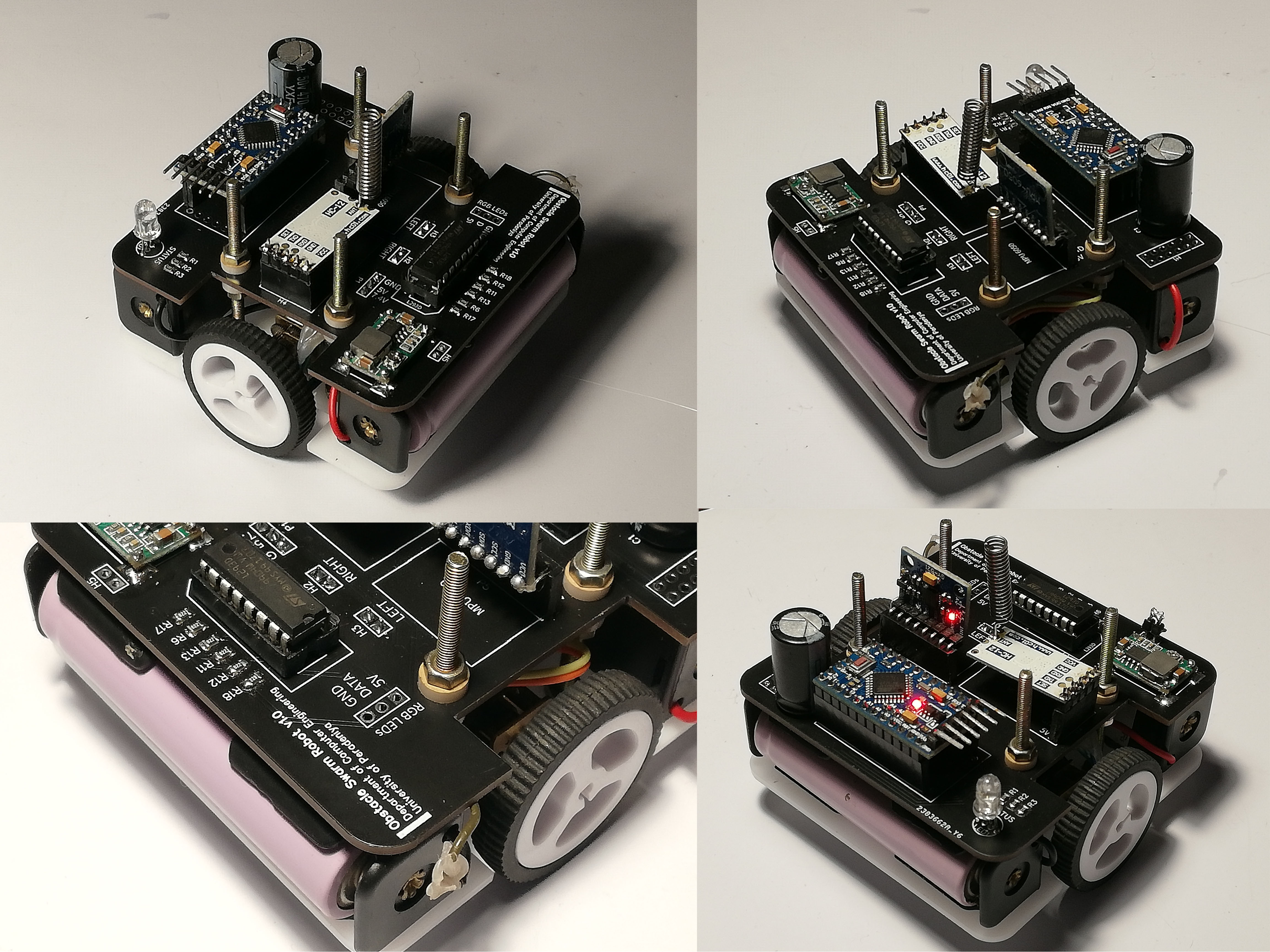
Each robot has its own radio module which uses a 433Mhz radio band. These modules can be used to communicate with the base station.
-
Each robot has two independent wheels that can perform forward, backward and turning operations. With the help of inbuilt gyroscope robots can perform accurate turning operations.