Explore fine-tuning the Vision Transformer (ViT) model for object recognition in robotics using PyTorch. This tutorial covers setup, training, and evaluation processes, achieving impressive accuracy with practical resource constraints. Ideal for learners in AI and robotics.
This tutorial demonstrates how to fine-tune a Vision Transformer (ViT) model, specifically the vit_b_16, to recognize objects in the context of robotics applications using PyTorch.
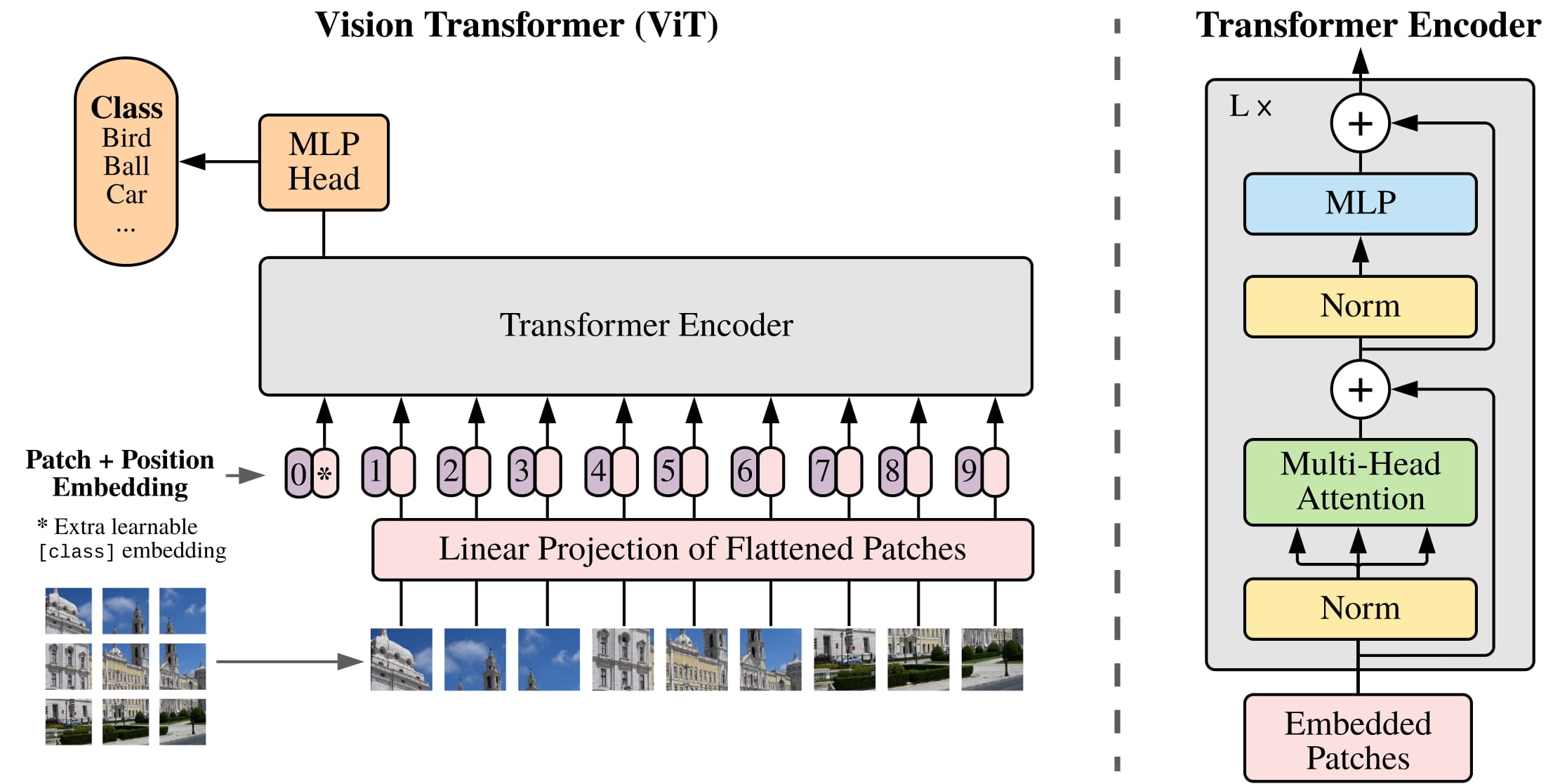
Vision Transformers have recently emerged as a powerful class of models in computer vision, rivaling traditional CNNs in various tasks. This tutorial aims to leverage the vit_b_16 model, pre-trained on ImageNet, and fine-tune it for a specific object recognition task relevant to robotics.
Before you begin, ensure you have the following installed:
- Python 3.8 or later
- PyTorch 1.7 or later
- torchvision
- CUDA Toolkit (if utilizing GPU acceleration)
Clone this repository to get started:
git clone https://github.com/jman4162/ViT-Robotics-Tutorial.git
cd ViT-Robotics-Tutorial- Data Preparation: How to prepare and load data using PyTorch.
- Model Fine-Tuning: Adjust the Vision Transformer to better suit our specific task.
- Training: Run the training loop, implementing effective strategies for learning.
- Evaluation: Assess the model's performance on unseen data.
To run the tutorial, execute the following command:
python train.pyOur model achieved an accuracy of 97.65% on the test set, showcasing the effectiveness of Vision Transformers when applied to robotics-related tasks, even with limited computational resources.
Contributions to this tutorial are welcome! Please feel free to fork the repository, make changes, and submit a pull request.
Distributed under the MIT License. See LICENSE for more information.