Welcome to the RACECAR dataset!
The RACECAR dataset is the first open dataset for full-scale and high-speed autonomous racing. Multi-modal sensor data has been collected from fully autonomous Indy race cars operating at speeds of up to 170 mph (273 kph). Six teams who raced in the Indy Autonomous Challenge during 2021-22 have contributed to this dataset. The dataset spans 11 interesting racing scenarios across two race tracks which include solo laps, multi-agent laps, overtaking situations, high-accelerations, banked tracks, obstacle avoidance, pit entry and exit at different speeds. The data is organized and released in both ROS2 and nuScenes format. We have also developed the ROS2-to-nuScenes conversion library to achieve this. The RACECAR data is unique because of the high-speed environment of autonomous racing and is suitable to explore issues regarding localization, object detection and tracking (LiDAR, Radar, and Camera), and mapping that arise at the limits of operation of the autonomous vehicle.
This repository describes how the data was collected, how to download the data, its format and organization in ROS2 and NuScenes, as well as helper scripts used to parse the dataset, custom ros messages describing GNSS/IMU/Radar data, and a conversion script that converts ros2 bags to nuScenes json files.
- Data Collection
- Data Usage and Availability
- Data Organization
- Scenario Description
- Coordinate Conventions
- RACECAR ROS2 - Data Structure
- RACECAR nuScenes - Data Structure
- Tutorials
- Acknowledgements
The RACECAR dataset is compiled by contributions from several teams, all of whom competed in the inaugural season of the Indy Autonomous Challenge during 2021-22. Nine university teams participated in two races. The first race was held at the Indianapolis Motor Speedway (IMS) track in Indiana, USA in October 2021, and the second race was held at Las Vegas Motor Speedway (LVMS) in January 2022. At IMS, teams reached speeds up to 150 mph on straights and 136 mph in turns, competing in solo vehicle time trials and obstacle avoidance. At LVMS, teams participated in a head-to-head overtaking competition reaching speeds in excess of 150 mph, with the fastest overtake taking place at 170 mph.
The AV-21 Indy Lights vehicle is outfitted with three radars, six pinhole cameras, and three solid- state LiDARs. Each of the sensor modalities covers a 360- degree field of view around the vehicle. For localization, the vehicle is equipped with two sets of high-precision Real-Time Kinematic (RTK) GNSS receivers and IMU.
The nine teams that participated were:
| Team | Initial |
|---|---|
| Black and Gold Autonomous Racing | B |
| TUM Autonomous Motorsport | T |
| KAIST | K |
| PoliMOVE | P |
| TII EuroRacing | E |
| AI Racing Tech | H |
| MIT-PITT-RW | M |
| Cavalier Autonomous Racing | C |
| Autonomous Tiger Racing | A |
This work is licensed under the Creative Commons Attribution-NonCommercial 4.0 International Public License (CC BY-NC 4.0). To obtain a copy of this license, see LICENSE-CC-BY-NC-4.0.txt in the archive, visit CreativeCommons.org or send a letter to Creative Commons, PO Box 1866, Mountain View, CA 94042, USA.
Under the following terms:
Attribution — You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use. NonCommercial — You may not use the material for commercial purposes. No additional restrictions — You may not apply legal terms or technological measures that legally restrict others from doing anything the license permits.
Please refer to our paper for more information and cite it if you use it in your research.
@inproceedings{Kulkarni_2023,
title={RACECAR - The Dataset for High-Speed Autonomous Racing},
url={http://dx.doi.org/10.1109/IROS55552.2023.10342053},
DOI={10.1109/iros55552.2023.10342053},
booktitle={2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
publisher={IEEE},
author={Kulkarni, Amar and Chrosniak, John and Ducote, Emory and Sauerbeck, Florian and Saba, Andrew and Chirimar, Utkarsh and Link, John and Behl, Madhur and Cellina, Marcello},
year={2023},
month=oct }
Both the ROS2 and nuScenes datasets are available on AWS S3.
- AWS Bucket Name: s3://racecar-dataset
- Region: us-west-2
The bucket is organized by
(RACECAR-ROS2)
- Dataset Format (
RACECAR-ROS2orRACECAR-nuScenes) - Scenario (
S1,S2,...,S11) - Scene ('M-MULTI-SLOW_KAIST', 'E-SOLO-FAST-100-140', etc.)
(RACECAR-nuScenes)
- Dataset Format (
RACECAR-ROS2orRACECAR-nuScenes) - Category ('MULTI-FAST', 'MULTI-SLOW',etc)
Download using AWS Command Line Interface (Recommended)
Multiple objects or folders can be downloaded using the AWS CLI. See these instructions for installing AWS CLI v2.
Example download usage:
aws s3 cp s3://racecar-dataset/RACECAR-ROS2/S5/M-MULTI-SLOW-KAIST . --recursive --no-sign-request
This command will download the corresponding rosbag2 folder containing the metadata and db3 file.
Download using URL
Only individual objects can be downloaded using URLs, making them inconvenient for downloading rosbags.
Example URL:
The dataset is released in both the rosbag2 and nuScenes format. Under the dataset root directory, two folders seperate the ROS2 and nuScenes directories.
├── data
│ ├── RACECAR nuScenes
│ ├── RACECAR
Each recorded autonomous run is classified by a scenario description. This indicates the speed range of the run, the track the run takes place, and whether or not the run is multi-agent. Also specified are which teams contributed to each scenario.
| Scenario | Track | Description | Speeds | Teams* |
|---|---|---|---|---|
| S1 | LVMS | Solo Slow Lap | < 70 mph | C, M, P |
| S2 | LVMS | Solo Slow Lap | 70-100 mph | C,M |
| S3 | LVMS | Solo Fast Lap | 100-140 mph | E,M |
| S4 | LVMS | Solo Fast Lap | > 140 mph | E,T |
| S5 | LVMS | Multi-Agent Slow | < 100 mph | C,E,K,M,P,T |
| S6 | LVMS | Multi-Agent Fast | > 130 mph | E,T |
| S7 | IMS | Solo Slow Lap | < 70 mph | C |
| S8 | IMS | Solo Slow Lap | 70-100 mph | |
| S9 | IMS | Solo Fast Lap | 100-140 mph | E,T |
| S10 | IMS | Solo Fast Lap | > 140 mph | P |
| S11 | IMS | Pylon Avoidance | < 70 mph | T |
* C - Cavalier, E - EuroRacing, K - KAIST, M - MIT-PITT-RW, P - PoliMove, T - TUM
The novatel pwrpak7 used to collect GNSS measurements on the AV21 uses a Y-forward, X-right, Z-up coordinate convention. Exact measurements and orientation can be found here.
Due to cabling considerations, the placement of the unit is rotated 180 degrees around the Z-axis in the vehicle. Therefore orientation measurements coming from topics such as novatel_oem7_msgs/msg/BESTVEL, must be rotated 180 degrees in order to correctly correspond to the YXZ convention.
The accompanying Unified Robotics Description Format (urdf) has a coordinate convention of X-forward, Y-left, Z-up. In order to properly match with this convention, orientation and velocity measurements (from the IMU for example) should be rotated a subsequent 90 degrees counter-clockwise. A 90 degree clockwise rotation will equate to the same series of transformations.

We have taken into account these rotations in the local_odometry topic, but if you desire to use the raw measurements to do your own sensor fusion or filtering, please take these orientations into account.
The accompanying urdf, located in racecar_utils/urdf contains joints for every sensor on the car, as well as the approximate center of gravity. These were measured during the initial assembly of the car.

RACECAR
├── S1
│ ├── C_SOLO-SLOW-70
│ │ ├── metadata.yaml
│ │ └── SOLO-SLOW-70.db3
│ ├── M_SOLO-SLOW-70
│ │ ├── metadata.yaml
│ │ └── SOLO-SLOW-70.db3
│ └── P_SOLO-SLOW-70
│ ├── metadata.yaml
│ └── SOLO-SLOW-70.db3
...
├── S6
│ ├── E_MULTI-FAST-TUM
│ │ ├── metadata.yaml
│ │ └── MULTI-FAST-TUM.db3
│ ├── T_MULTI-FAST-EURO
│ │ ├── metadata.yaml
│ │ └── MULTI-FAST-EURO.db3
│ └── T_MULTI-FAST-POLI
│ ├── metadata.yaml
│ └── MULTI-FAST-POLI.db3
The ROS2 folder structure is organized by scenario, with each scenario folder containing a collection of rosbags. The rosbags are named corresponding to contributing racing team and a short scenario description. Inside the rosbag are the typical metadata and sqlite files.
TEAM_DESCRIPTION
The ROS2 data was parsed and processed using python utility scripts located in racecar_py. You can use these scripts as a baseline for doing your own bag conversion or coordiante system transformations.
All topics in the dataset are namespaced by their vehicle number. Each rosbag contains all sensor data available from the ego vehicle, and if a multi-agent label is included, it will be present as an nav_msgs/msg/Odometry topic named local_odometry.
If additional namespacing or merging is required, a script is included in the racecar_utils folder called rosbag_merger. The inbuilt rosbag2 cli tools available in ROS2 Humble are also useful for performing bag merging and conversion.
| Topic Name | Topic Type | Description |
|---|---|---|
| Camera Topics | ||
camera/xxx/camera_info |
sensor_msgs/msg/CameraInfo |
Distortion parameters and Intrinsic Camera Matrix |
camera/xxx/image/compressed |
sensor_msgs/msg/CompressedImage |
Compressed camera image buffer and compression format |
| LIDAR Topics | ||
luminar_points |
sensor_msgs/msg/PointCloud2 |
Merge LiDAR point cloud from all three sensors |
luminar_xxx_points |
sensor_msgs/msg/PointCloud2 |
LiDAR point cloud corresponding to xxx sensor |
| GNSS Topics | ||
novatel_xxx/bestgnsspos |
novatel_oem7_msgs/msg/BESTPOS |
Best available GNSS solution from Novatel PwrPak. Measurement located at antenna phase center transmitted at 20 Hz |
novatel_xxx/bestpos |
novatel_oem7_msgs/msg/BESTPOS |
Best available GNSS solution from Novatel PwrPak. Measurement located at antenna phase center transmitted at 20 Hz |
novatel_xxx/bestvel |
novatel_oem7_msgs/msg/BESTVEL |
Velocity derived from differentiated position. Uses the same solution method from BESTPOS transmitted at 20 Hz |
novatel_xxx/heading2 |
novatel_oem7_msgs/msg/HEADING2 |
Heading derived from alignment of dual antenna system at variable rate |
novatel_xxx/oem7raw |
novatel_oem7_msgs/msg/Oem7RawMsg |
Binary data received from Novatel receivers before driver processing |
novatel_xxx/rawimu |
novatel_oem7_msgs/msg/RAWIMU |
Accelerometer and Gyroscope data transmitted from receiver at 125 Hz |
novatel_xxx/rawimux |
sensor_msgs/msg/Imu |
Accelerometer and Gyroscope data transmitted from receiver at 125 Hz |
novatel_xxx/time |
novatel_oem7_msgs/msg/TIME |
Satellite time accompanying GNSS packets |
| Radar Topics | ||
radar_front/esr_status1 |
delphi_esr_msgs/msg/EsrStatus1 |
|
radar_front/esr_status2 |
delphi_esr_msgs/msg/EsrStatus2 |
|
radar_front/esr_status3 |
delphi_esr_msgs/msg/EsrStatus3 |
|
radar_front/esr_status4 |
delphi_esr_msgs/msg/EsrStatus4 |
|
radar_front/esr_status5 |
delphi_esr_msgs/msg/EsrStatus5 |
|
radar_front/esr_status6 |
delphi_esr_msgs/msg/EsrStatus6 |
|
radar_front/esr_status7 |
delphi_esr_msgs/msg/EsrStatus7 |
|
radar_front/esr_status8 |
delphi_esr_msgs/msg/EsrStatus8 |
|
radar_front/esr_track |
delphi_esr_msgs/msg/EsrTrack |
Radar detection |
radar_front/esr_valid1 |
delphi_esr_msgs/msg/EsrValid1 |
|
radar_front/esr_valid2 |
delphi_esr_msgs/msg/EsrValid2 |
|
radar_front/esr_vehicle1 |
delphi_esr_msgs/msg/EsrVehicle1 |
|
radar_front/esr_vehicle2 |
delphi_esr_msgs/msg/EsrVehicle2 |
|
radar_front/from_can_bus |
can_msgs/msg/Frame |
Raw CAN data received from Aptiv ESR Radar |
radar_front/to_can_bus |
can_msgs/msg/Frame |
Raw CAN data sent to Aptiv ESR Radar |
radar_front/radar_visz_moving |
visualization_msgs/msg/Marker |
Visualization of radar detection |
radar_front/radar_visz_static |
visualization_msgs/msg/Marker |
Visualization of radar detection |
radar_xxx/marker |
visualization_msgs/msg/Marker |
Visualization of radar detection |
radar_xxx/detection |
delphi_mrr_msgs/msg/Detection |
Detection from Aptiv MRR Radar |
| Vehicle Positions | ||
local_odometry |
nav_msgs/msg/Odometry |
Vehicle odometry in Cartesian coordinates derived from RTK GNSS solution |
Topic placeholders xxx refer to the specific sensor. For the cameras there is:
front_leftfront_rightfront_left_centerfront_right_centerrear_leftrear_right
For LIDAR:
luminar_front_pointsluminar_left_pointsluminar_right_points
For GNSS:
novatel_topnovatel_bottom
We have also released the dataset in the nuScenes format for easier accessibility to those unfamiliar with ROS2. The conversion process is done using the rosbag2nuscenes conversion tool.

The nuScenes dataset is structured as follows:
RACECAR nuScenes
├── v1.0-mini
│ ├── scene.json
│ ├── log.json
│ ├── map.json
│ ├── sample.json
│ ├── sample_data.json
│ ├── ego_pose.json
│ ├── calibrated_sensor.json
│ ├── sensor.json
│ ├── instance.json
│ ├── sample_annotation.json
│ ├── category.json
│ ├── attribute.json
│ └── visibility.json
├── samples
│ ├── SENSOR1
│ │ ├── data(.png, .pcd, .pcd.bin)
│ │ └── ...
│ └── SENSOR2
│ ├── data(.png, .pcd, .pcd.bin)
│ └── ...
├── sweeps
│ ├── SENSOR1
│ │ ├── data(.png, .pcd, .pcd.bin)
│ │ └── ...
│ └── SENSOR2
│ ├── data(.png, .pcd, .pcd.bin)
│ └── ...
For more information on the contents of each JSON file, please refer to the nuScenes documentation.
Our nuScenes schema deviates slightly from the original. First, we have classified each ROS2 bag as a scene rather than splitting each bag into twenty second intervals. We believe the longer scene intervals (typically over 10 mins) widen opportunities for exploration into mapping and localization problems. Second, our dataset has no entries in the Annotation or Taxonomy JSON files due to the absence of annotations. These files are still present but have dummy entires to maintain compatibilty with the Python nuScenes development kit. Each scene in this format is seperated by the same Scenario classification as the rosbags.
This guide provides a walkthrough of how to explore the nuScenes release using the Python development kit. Similar to the nuScenes release, we have batched the sensor data from each scene into separate tarballs to allow users to only download the data they are interested in working with. Each tarball follows the naming convention of {TEAM_NAME}_{BAG NAME}.tar.gz.
All code was tested with the following environment.
- Linux (tested on Ubuntu 20.04/22.04)
- Python 3.8+
For racecar_utils please install the following.
The delphi_esr_msgs, novatel_oem7_msgs, and novatel_gps_msgs are the radar and gps messages obtained from the Autonomous Stuff and Novatel drivers. Install these packages in order to parse the radar and novatel custom messages in the dataset. They are all located in the ros2_custom_msgs directory.
- novatel_oem7_msgs
- novatel_gps_msgs
- delphi_esr_msgs
- can_msgs
First create a dev workspace that looks like the following. This will be our working directory.
├── data
│ └── RACECAR
└── racecar_ws
├── conversion_configs
├── urdf
├── racecar_py
├── racecar_utils
├── ros2_custom_msgs
└── rosbag2nuscenes
In the working directory source your ROS2 installation, and build the packages in racecar_utils and ros2_custom_msgs. Source the installation folder in the working directory to then use the installed messages.
source /opt/ros/${ROS_DISTRO}/setup.bash
colcon build
source install/setup.bash
The can_msgs package should be available via apt.
sudo apt install ros-${ROS_DISTRO}-can-msgs
When replaying a bag, it is recommended to publish the ego vehicles odometry as part of the tf tree, in order to visualize it's position and sensor data in reference to the inertial map frame.
We have provided an example node odom_to_tf.cpp, that takes in the local_odometry topics from both the ego and opponenet vehicles and publishes them to the tf tree. It is important to have the ego vehicle's frame match up with the appropriate frame in the URDF so that LiDAR and Radar point clouds can be easily visualized.
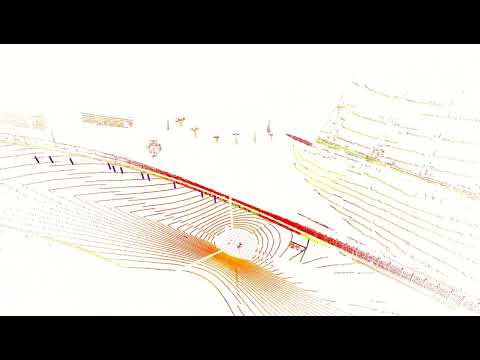
The node and accompanying launch file should be built along with racecar_utils. To run, use the launch file and use the provided parameters to remap the odometry topic names appropriately. Click the following image to see an example of the RVIZ visualization.
ros2 launch racecar_utils odom_to_tf.launch.py ego_topic:=/vehicle_3/local_odometry opp_topic:=/vehicle_5/local_odometry
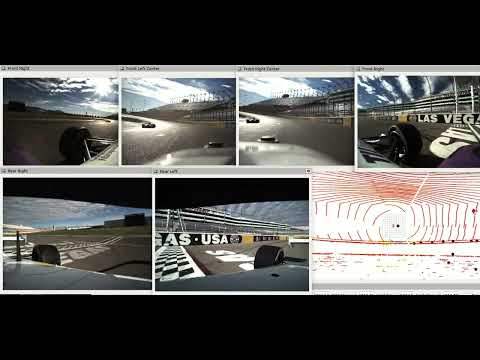
Camera RVIZ
We have also provided an RVIZ config for visualizing camera images from the bags.
./racecar_utils/rviz/cameras.rviz

Please note that this RVIZ configuration is set to show the images from all six bag topics in the format camera_idX_imageU8, which is different from the specified camera topics above. If you would like to visualize other camera topics, you may simply change the topic information in the RVIZ configuration.
An example of using the dataset is creating a more robust localization method than just using GPS. If you have examined a few of the scenarios, you may notice that there are occasional message drops, spikes in GNSS standard deviation, or small abrubt shifts in reported position. For accurate object detection, having smooth unfettered orientation estimates is very useful, so we will implement a simple extended kalman filter in order to filter through these noisy measurements.
An open source package, robot_localization which is shipped as part of the full ROS2 installation will suffice to fuse measurements from a GNSS receiver, and an IMU. Install the package with the following command. For additional details about using the package, please reference the repository documentation directly.
sudo apt install ros-${ROS_DISTRO}-robot-localization
In order to use the extended kalman filter, we must transform our inputs into standard message types, and make sure they are in a common coordinate system. Please see Coordinate Conventions for the required rotations. Using the convert_imu node, we convert the novatel_oem7_msgs/msg/RAWIMU message to the standard sensor_msgs/msg/Imu which feeds into robot_localization. The local_odometry topic is already a stantard message type, and does not need to be adjusted.
We provide a simple configuration file config/ekf.yaml which instructs the ekf node to subscribe to the local_odometry topic, and the frame corrected IMU topics.
To run the example, source the workspace and run your selected bag using a clock message. Subsequently run the provided launch file
ros2 bag play YOUR/BAG/HERE --clock 100.0
ros2 launch racecar_utils localization.launch.py ns:=vehicle_x use_sim_time:=true
Using a different motion model, tweaking the sensor measurement covariances, and adjusting which inputs are used, are all methods to gain more stable performance from the filter.
For a full walkthrough of using the nuScenes devkit and loading and visualizing the RACECAR data using it, please refer to this jupyter notebook.
The RACECAR data would not be possible without the efforts and contributions of the following individuals.
Amar Kulkarni, John Chrosniak, Emory Ducote, Utkarsh Chirimar, John Link, Madhur Behl, Andrew Shehab Saha, Calvin Chanyoung Jung, Andrea Tecozzi, Marcello Cellina, Giulio Panzani, Matteo Corno, Phillip Karle, Florian Sauerbeck, Sebastian Huch, Maximilian Geisslinger, Felix Fent, Micaela Verucchi, Ayoub Raji, Danilo Caporale, Francesco Gatti.