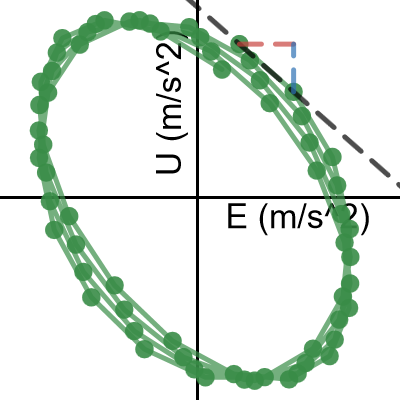
Demonstrates how we find the rotational direction clockwise or anticlockwise:
The data is:
2.8697358266694493, 10.153302161258436
6.460969159839447, 6.9903282338783743
9.0304916052962074, 2.6756155308647633
10.17839883866681, -2.1005916224136736
9.7260377925625967, -6.5742215226332306
7.7438110971825962, -10.029607133544683
4.5402200574177174, -11.913974615019903
0.6138514486397435, -11.925873082486047
-3.4242193954793008, -10.063399083682736
-6.945532507391289, -6.6245011026244169
-9.4020528452473773, -2.1593153778824958
-10.411463022501062, 2.6178419076657491
-9.8166647831462441, 6.9427470536936493
-7.710228786944179, 10.123525203104277
-4.4199874937304147, 11.651332727361739
-0.45801337974073675, 11.28175926905354
3.5590768042977032, 9.0739271846290865
7.0060883889102223, 5.3810334706297853
9.3465501549839978, 0.79384722473040692
10.216207342675848, -3.9537983888284671
9.4797119729492003, -8.1024007868643704
7.2516875563932324, -10.988289069235661
3.8788898104229705, -12.149794488179921
-0.11376022127295496, -11.401105709432661
-4.1048715809279983, -8.8619939012201083
-7.4732927800225823, -4.9386523926766221
-9.6947839131178366, -0.25871606917244694
-10.423606061975299, 4.4291442509233274
-9.5463299278775207, 8.3749901112657117
-7.1994892547951954, 10.94758650239859
-3.748331575569114, 11.735383413308186
0.27002661858099841, 10.612353368997487
4.2301933130557616, 7.7581526220746717
7.5158330525412218, 3.6293807203281379
9.6155895177045974, -1.1134638112923769
10.202669808941147, -5.7116464406409646
9.1857044394286813, -9.4295748617208428
6.7229675078132738, -11.672475060265134
3.1977439122238325, -12.081540033124751
-0.84132270238858831, -10.591329785644493
-4.7656173930128665, -7.4402400669121853
-7.9643875975658416, -3.1323651114207935
-9.939796825169525, 1.6431446212044598
-10.384404798770509, 6.1223289972115298
-9.2290155276478583, 9.5886324054563126
-6.653446536522142, 11.487534435835212
-3.0585431961332685, 11.515259045510792
0.9962063310136845, 9.6673710018687764
4.8797463119656141, 6.2394854069648282
7.9876669915144571, 1.7799767975899237
9.8362711278805879, -2.9977468374907192
10.137853591460548, -7.3293711964237973
8.845477983020773, -10.521946518892491
6.1602815198844656, -12.064741928630792
2.5001713035439228, -11.710949387634868
-1.5652161151366459, -9.517166706834729
-5.4031693886240948, -5.8343433354154559
-8.4163735903550467, -1.2516373722899143
-10.135872555878583, 3.4978347496269047
-10.294054272976654, 7.6542782522569279
-8.866300333346933, 10.552767858094485
-6.0748173869486362, 11.729618928026229
-2.3540542955345503, 10.996565213813398
Acquiring acceleration delta between T1 and T2.
c\ =\ \left(-\frac{\left(U\left[T_2\right]-U\left[T_1\right]\right)}{\left(E\left[T_2\right]-E\left[T_1\right]\right)}\right)E\left[T_1\right]+U\left[T_1\right]
y=\left(\frac{\left(U\left[T_2\right]-U\left[T_1\right]\right)}{\left(E\left[T_2\right]-E\left[T_1\right]\right)}\right)x+c
Note whether East acceleration is Positive/Negative and Increasing/Decreasing.
y=U\left[T_1\right]\left\{\left\{E\left[T_1\right]\ge E\left[T_2\right]:\ E\left[T_1\right],E\left[T_2\right]\right\}\ge x\ge \left\{E\left[T_1\right]\ge E\left[T_2\right]:E\left[T_2\right],E\left[T_1\right]\right\}\right\}
Note whether Up acceleration is Positive/Negative and Increasing/Decreasing.
x=E\left[T_2\right]\left\{\left\{U\left[T_1\right]\ge U\left[T_2\right]:\ U\left[T_1\right],U\left[T_2\right]\right\}\ge y\ge \left\{U\left[T_1\right]\ge U\left[T_2\right]:U\left[T_2\right],U\left[T_1\right]\right\}\right\}
Consider the resultant change in acceleration (delta) between T1 and T2.
The opposite direction of the resultant change in acceleration is the actual rotational tangent direction.
The combination of the rotational tangent direction and the displacement position at the circle is what tells us whether we are rotating clockwise or anticlockwise.
- https://docs.python.org/3/howto/sockets.html - How sockets work, and how to receive RST close or timeout.
- https://en.wikipedia.org/wiki/Asynchronous_I/O#Polling - That we are mostly using polling (and not blocking poll, that is select)
- http://tldp.org/HOWTO/TCP-Keepalive-HOWTO/overview.html & https://en.wikipedia.org/wiki/Keepalive - The client needs to send keep alive packets instead of requesting messages, due to a push protocol.
- https://docs.python.org/3/library/_thread.html#module-_thread & http://www.dabeaz.com/python/UnderstandingGIL.pdf - that Python threasd are actually pthreads limited by the GIL, which means context switches occur with
timer.sleep(0), IO operations, and a timer interrupt specified by the Python runtime. - For the event loop to work with have to deal with the possibility of partial reads and partial writes. In most cases, we should only care about partial reads, we'll make sure the write goes through before continuing (so we will have blocking writes). This is because writes are meant to be real time, so bad writes can just be dropped. But partial reads means we have to maintain a buffer, and the buffer pair algorithm is needed to in case we have read overflow, that is read more than enough for 1 message (this is to improve performance rather than to read 1 byte a time).
- http://compilerdesigndetails.blogspot.com.au/2012/02/buffering.html
- http://ecomputernotes.com/compiler-design/input-buffering
- http://www.slideshare.net/dattatraygandhmal/input-buffering
- http://stackoverflow.com/questions/1480236/does-a-tcp-socket-connection-have-a-keep-alive - however accoridng to this the TCP keepalive is an OS-dependent parameter, which means an application level PING PONG keep alive protocol is required instead...
- http://serverfault.com/questions/343750/tcp-connection-keep-alive-direction - both the client and server can initiate TCP keepalive
- http://stackoverflow.com/a/23240725/582917 - Also this says it as well
- https://delog.wordpress.com/2013/08/16/handling-tcp-keepalive/ - however this shows that Linux and specifically Python on Linux exposes the TCP keepalive as socket-specific configuration, but I know that Java doesn't, and it doesn't work on Windows or Mac. So again, although Linux allows changing the TCP keepalive parameters for a given socket this isn't available across the board, which makes TCP keep alive of limited utility!
- Figure out how to do service discovery for the serial port service (controller device to the server). Also how do drivers get installed on Linux? How do they detect a relevant serial device? Is it via udev script? What about mac or windows?
- Relationship between rolling window increment and rolling window size actually gives rise to both latency and accuracy and efficiency tradeoff.
Assume our local reference frame for the device is ENU oriented. This is marked on the device with X and Y and Z arrows.
East is X North is Y Up is Z
We only care about East and Up for our rotational game.
We will send data from the display callback which is executed on the main
Investigate thresholding.
Without a broadcast/fanout queue, this currently only allows 1 analysis to 1 server, cannot work with multiple game clients.
Used this for the TCP Server: http://stackoverflow.com/questions/25245223/python-queue-queue-wont-work-in-threaded-tcp-stream-handler
The difference between the two is what the application does between polls.
If a program polls a device say every second, and does something else in the mean time if no data is available (including possibly just sleeping, leaving the CPU available for others), it's polling. If the program continuously polls the device (or resource or whatever) without doing anything in between checks, it's called a busy-wait.
This isn't directly related to synchronization. A program that blocks on a condition variable (that should signal when a device or resource is available) is neither polling nor busy-waiting. That's more like event-driven/interrupt-driven I/O. (But for example a thread that loops around a try_lock is a form of polling, and possibly busy-waiting if the loop is tight.) http://stackoverflow.com/a/10594529/582917
For inter-thread communication, we can use queue channels, locks as a condition variable combined with global variables (locks are required for both signalling the event, and maintaining atomicity of the global variable), or if its just 1 piece of data, then a single global variable.
We decided to opt for a single queue channel.
Yet we also still need a double input buffer algorithm in the analysis loop. Because it's polling only 1 event, that is the reading from the game controller, we can just have a blocking event loop.
Periodic Window vs Rolling Window vs Recursive Window.
Fanout dispatch can be made to take 1 queue, and then establish a queue for each subscriber. It will then fan out all message from the input queue to all other queues. Each queue is intended to be FIFO.
If the time window is 3000ms, this means the period is 3s. Then the minimum rotation frequency that can be performed that would allow 1 wavelength to be entirely captured in the time window is equal to 1 divided by the period. Therefore 1/3 = 0.333* Hz (a.k.a. RPS). Multiply this by 60 gives you the RPM (1/3 * 60 = 20 RPM).
However this is just theoretical. It's possible the frequency estimation algorithm can do a good job even without a full wavelength in its data window. It's also possible that even with a full wavelength, the frequency estimation cannot do its job. Specifically a zero crossing rate algorithm needs to have a full wavelength.
Currently our autocorrelation algorithm appears to fail when the RPM goes below 48 RPM, and this is even when there is more than a full wavelength available.
Possible Online Reset of Arduino (including Leonardos):
def reset(controller):
old_baud_rate = controller.baudrate
if controller.is_open:
controller.close()
# set to serial 9600 and open and close
controller.baudrate = 9600
controller.open()
controller.close()
# set to serial 1200 and open and close (and set DTR)
controller.baudrate = 1200
controller.open()
controller.setDTR(False)
controller.close()
timer.sleep(1)
# reopen with old baud rate
controller.baudrate = old_baud_rate
controller.open()
In the future, the server should be resilient to device plugins and unplugs. Detect both of these and continue running. When unplugging, it should signal game to reset (or close the game), and then restart from the beginning. It should also deal with when the device stops answering, and attempt to reset the game controller until it works, or after a few retries, indicate that the device is broken, and signal the game to exit, and close itself. The server itself should be starting the game, so the game should be a child process of the parent process.
Although we would want to use: http://stackoverflow.com/a/2162188/582917 We cannot use select on queues currently. And the current one only works on multiprocessing queues. And even though select.select works on unix computers, it currently does not work on Windows. So that is problematic. So we just to use an event loop.
Portability alert: On Unix, select works both with the sockets and files. Don’t try this on Windows. On Windows, select works with sockets only. Also note that in C, many of the more advanced socket options are done differently on Windows. In fact, on Windows I usually use threads (which work very, very well) with my sockets.
The b"" just creates an immutable bytes object. It is not useful. We should be using bytearray for building up buffers. The b"" + b"d", just ends up copying the old object.
Other: http://arduino.stackexchange.com/a/4222/27186
Also note the DOS issue in TCP and arduino.
-
http://www.dsfcode.com/using-processing-via-the-command-line/ (Linux automatically has processing-java)
See: https://github.com/processing/processing/wiki/Changes-in-3.0#things-that-may-break-your-2x-sketches
For serial messaging discussion:
- http://eli.thegreenplace.net/2009/08/12/framing-in-serial-communications
- https://github.com/firmata/protocol
The first step to understand sine formulas:
40 Revolutions Per Minute = 0.6* Revolutions Per Second. Therefore 1 revolution should take 1.5 seconds.
This should be equal to 0.6* Hz on our graph. The frequency on our chart should be 0.6* Hz. And the the wavelength should equal 1500 milliseconds.
y(t) = A * sin (2 * pi * f * t + p)
A amplitude => 45
f frequency => (1/1.5)
p phase offset => ?
y(t) = 45 * sin (2 * pi * (1/1.5) * t + phi)
y(t) = 45 * sin (2 * pi * (1/1.5) * t)
This is a graph over seconds. But we can create a graph over milliseconds
http://obogason.com/fundamental-frequency-estimation-and-machine-learning/ http://tkf.github.io/2010/10/03/estimate-frequency-using-numpy.html https://gist.github.com/endolith/255291 http://exnumerus.blogspot.com.au/2010/04/how-to-fit-sine-wave-example-in-python.html http://scipy-cookbook.readthedocs.io/items/FittingData.html
The fs appears to the number of samples in the sample set.
A phase is the position of an instant on a waveform cycle. A 0 degree or 360 degree phase is equivalent to the starting point point of a wave. 180 degrees is in the middle of the wave. 90 degrees is the crest and 270 degrees is trough of the wave. We are talking about the bump then dump.
Phase velocity = Wavelength divided by Period. Period is the time it takes to go from 1 crest to another crest, so basically start to a finish of a wave cycle. Frequency is the number of cycles per second.
When the wavelength and period is the same, then the phase velocity is 1. Wavelength is measured in meters, while period is measured in seconds.
Wavelength is given by the distance between two successive peaks/troughs in a displacement vs. position graph. Period is given by the distance between two successive peaks in a displacement vs. time graph.
l = lambda
v = phase velocity
f = frequency
T = period
v
l = ---
f
v
f = ---
l
1
f = ---
T
l
v = ---
T
Ok so basically we don't have wavelength. We just have period.
Our period is 1.5 seconds.
Move the below into the Service Discovery section of Matrix AI. One quick implementation would have to do with the game code. Passing serial port information, autobaud detection and TCP port and address assignment. I suspect registering the device so that its recognisable immediately involves installing a "driver", which in Linux should just be a udev file right?