
An efficient constant access time vector with dynamic capacity and pinned elements.
There are various situations where pinned elements are critical.
- It is critical in enabling efficient, convenient and safe self-referential collections with thin references, see
SelfRefColfor details, and its special cases such asLinkedList. - It is important for concurrent programs as it eliminates safety concerns related with elements implicitly carried to different memory locations. This helps reducing and dealing with the complexity of concurrency, and leads to efficient concurrent data structures. See
ConcurrentIter,ConcurrentBagorConcurrentOrderedBagfor such concurrent data structures which are conveniently built on the pinned element guarantees of pinned vectors. - It is essential in allowing an immutable push vector; i.e.,
ImpVec. This is a very useful operation when the desired collection is a bag or a container of things, rather than having a collective meaning. In such cases,ImpVecallows avoiding certain borrow checker complexities, heap allocations and wide pointers such asBoxorRcor etc.
FixedVec is another PinnedVec implementation aiming the same goal but with different features. You may see the comparison in the table below.
FixedVec |
SplitVec |
|---|---|
Implements PinnedVec => can be wrapped by an ImpVec or SelfRefCol or ConcurrentBag, etc. |
Implements PinnedVec => can as well be wrapped by them. |
| Requires exact capacity to be known while creating. | Can be created with any level of prior information about required capacity. |
Cannot grow beyond capacity; panics when push is called at capacity. |
Can grow dynamically. Further, it provides control on how it must grow. |
It is just a wrapper around std::vec::Vec; hence, has equivalent performance. |
Performance-optimized built-in growth strategies also have std::vec::Vec equivalent performance. |
After the performance optimizations on the SplitVec, it is now comparable to std::vec::Vec in terms of performance (see E. Benchmarks for the experiments). This might make SplitVec a dominating choice over FixedVec.
As the name suggests, SplitVec is a vector represented as a sequence of multiple contagious data fragments.
The vector is said to be at its capacity when all fragments are completely utilized. When the vector needs to grow further while at capacity, a new fragment is allocated. Therefore, growth does not require copying memory to a new memory location. Already pushed elements stay pinned to their memory locations.
The capacity of the new fragment is determined by the chosen growth strategy. Assume that vec: SplitVec<_, G> where G: Growth contains one fragment of capacity C, which is also the capacity of the vector since it is the only fragment. Assume, we used up all capacity; i.e., vec.len() == vec.capacity() (C). If we attempt to push a new element, SplitVec will allocate the second fragment with the following capacity:
Growth Strategy |
1st Fragment Capacity | 2nd Fragment Capacity | Vector Capacity |
|---|---|---|---|
Linear |
C |
C |
2 * C |
Doubling |
C |
2 * C |
3 * C |
C is set on initialization as a power of two for Linear strategy, and it is fixed to 4 for Doubling strategy to allow for access time optimizations.
In addition there exists the Recursive growth strategy, which behaves as the Doubling strategy at the beginning. However, it allows for zero-cost append operation at the expense of a reduced random access time performance.
Growth strategies which allow for constant time random access additionally implement the GrowthWithConstantTimeAccess trait, which are currently Doubling and Linear strategies.
Please see the E. Benchmarks section for tradeoffs and details. The summary is as follows:
- Use
SplitVec<T, Doubling>(or equivalentlySplitVec<T>)- when it is required to have pinned elements and we need close to standard vector serial and random access performance, or
- when the elements are large and we don't have good capacity estimates, so that we can benefit from split vector's no-copy growth
- Use
SplitVec<T, Recursive>- when it is required to have pinned elements and we need close to standard vector serial access performance while it is okay to have slower random access performance, or
- when
appending other vectors or split vectors is a frequent and important operation.
- Use
SplitVec<T, Linear>when we have a good idea on the chunk size of the growth to reduce impact of wasted capacity with doubling ofstd::vec::VecorDoublingorRecursive.
In order to define a custom growth strategy, one needs to implement the Growth trait. Implementation is straightforward. The trait contains two methods. The following method is required:
fn new_fragment_capacity<T>(&self, fragments: &[Fragment<T>]) -> usizeNotice that it takes as argument all already allocated fragments and needs to decide on the capacity of the new fragment.
The second method fn get_fragment_and_inner_indices<T>(&self, vec_len: usize, fragments: &[Fragment<T>], element_index: usize) -> Option<(usize, usize)> has a default implementation and can be overwritten if the strategy allows for efficient computation of the indices.
use orx_split_vec::*;
let mut vec = SplitVec::new();
vec.push(0);
vec.extend_from_slice(&[1, 2, 3]);
assert_eq!(vec, &[0, 1, 2, 3]);
vec[0] = 10;
assert_eq!(10, vec[0]);
vec.remove(0);
vec.insert(0, 0);
assert_eq!(6, vec.iter().sum());
assert_eq!(vec.clone(), vec);
let std_vec: Vec<_> = vec.into();
assert_eq!(&std_vec, &[0, 1, 2, 3]);use orx_split_vec::*;
#[derive(Clone)]
struct MyCustomGrowth;
impl Growth for MyCustomGrowth {
fn new_fragment_capacity_from(&self, fragment_capacities: impl ExactSizeIterator<Item = usize>) -> usize {
fragment_capacities.last().map(|f| f + 1).unwrap_or(4)
}
}
impl PseudoDefault for MyCustomGrowth {
fn pseudo_default() -> Self {
MyCustomGrowth
}
}
// set the growth explicitly
let vec: SplitVec<i32, Linear> = SplitVec::with_linear_growth(4);
let vec: SplitVec<i32, Doubling> = SplitVec::with_doubling_growth();
let vec: SplitVec<i32, MyCustomGrowth> = SplitVec::with_growth(MyCustomGrowth);
// methods revealing fragments
let mut vec = SplitVec::with_doubling_growth();
vec.extend_from_slice(&[0, 1, 2, 3]);
assert_eq!(4, vec.capacity());
assert_eq!(1, vec.fragments().len());
vec.push(4);
assert_eq!(vec, &[0, 1, 2, 3, 4]);
assert_eq!(2, vec.fragments().len());
assert_eq!(4 + 8, vec.capacity());
// SplitVec is not contagious; instead a collection of contagious fragments
// so it might or might not return a slice for a given range
let slice: SplitVecSlice<_> = vec.try_get_slice(1..3);
assert_eq!(slice, SplitVecSlice::Ok(&[1, 2]));
let slice = vec.try_get_slice(3..5);
// the slice spans from fragment 0 to fragment 1
assert_eq!(slice, SplitVecSlice::Fragmented(0, 1));
let slice = vec.try_get_slice(3..7);
assert_eq!(slice, SplitVecSlice::OutOfBounds);
// or the slice can be obtained as a vector of slices
let slices = vec.slices(0..3);
assert_eq!(1, slices.len());
assert_eq!(slices[0], &[0, 1, 2]);
let slices = vec.slices(3..5);
assert_eq!(2, slices.len());
assert_eq!(slices[0], &[3]);
assert_eq!(slices[1], &[4]);
let slices = vec.slices(0..vec.len());
assert_eq!(2, slices.len());
assert_eq!(slices[0], &[0, 1, 2, 3]);
assert_eq!(slices[1], &[4]);Unless elements are removed from the vector, the memory location of an element already pushed to the SplitVec never changes unless explicitly changed.
use orx_split_vec::*;
let mut vec = SplitVec::new(); // Doubling growth as the default strategy
// split vec with 1 item in 1 fragment
vec.push(42usize);
assert_eq!(&[42], &vec);
assert_eq!(1, vec.fragments().len());
assert_eq!(&[42], &vec.fragments()[0]);
// let's get a pointer to the first element
let addr42 = &vec[0] as *const usize;
// let's push 3 + 8 + 16 new elements to end up with 3 fragments
for i in 1..(3 + 8 + 16) {
vec.push(i);
}
for (i, elem) in vec.iter().enumerate() {
assert_eq!(if i == 0 { 42 } else { i }, *elem);
}
// now the split vector is composed of 11 fragments each with a capacity of 10
assert_eq!(3, vec.fragments().len());
// the memory location of the first element remains intact
assert_eq!(addr42, &vec[0] as *const usize);
// we can safely dereference it and read the correct value
// dereferencing is still unsafe for SplitVec,
// but the underlying guarantee will be used by wrappers such as ImpVec or SelfRefCol
assert_eq!(unsafe { *addr42 }, 42);Recall that the motivation of using a split vector is to get benefit of the pinned elements and to avoid standard vector's memory copies in very specific situations; rather than to be a replacement. The aim of performance optimizations and benchmarks is to make sure that performance of critical operations is kept within desired ranges. SplitVec seems to satisfy this. After optimizations, built-in growth strategies appear to have a similar performance to std::vec::Vec in growth, serial access and random access benchmarks, and a better performance in append benchmarks.
You may find the details of each benchmark in the following subsections. All the numbers in tables below represent duration in milliseconds.
You may see the benchmark at benches/grow.rs.
The benchmark compares the build up time of vectors by pushing elements one by one. The baseline is the vector created by std::vec::Vec::with_capacity which has the perfect information on the number of elements to be pushed. The compared variants are vectors created with no prior knowledge about capacity: std::vec::Vec::new, SplitVec<_, Linear> and SplitVec<_, Doubling>.
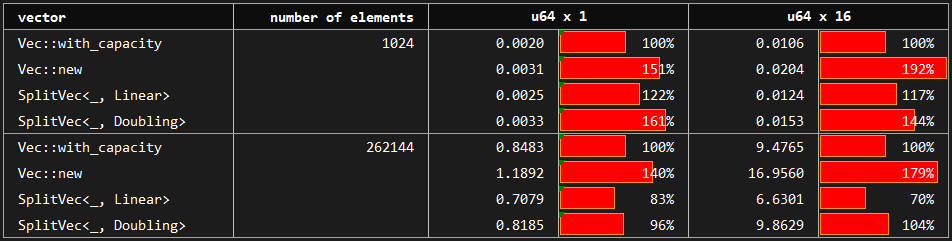
The baseline std_vec_with_capacity performs between 1.5 and 2.0 times faster than std_vec_new which has no capacity information and requires copies while growing. As mentioned before, SplitVec growth is copy-free guaranteeing that pushed elements stay pinned. Therefore, it is expected to perform in between. However, it performs almost as well as, and sometimes faster than, std_vec_with_capacity.
Recursive strategy is omitted here since it behaves exactly as the Doubling strategy. For its differences, please see random access and append benchmarks.
You may see the benchmark at benches/random_access.rs.
In this benchmark, we access vector elements by indices in a random order. Here the baseline is again the standard vector created by Vec::with_capacity, which is compared with Linear and Doubling growth strategies of the SplitVec which are optimized specifically for the random access. Furthermore, Recursive growth strategy which does not provide constant time random access operation is included in the benchmarks.
Note that Recursive uses the Growth trait's default get_fragment_and_inner_indices implementation, and hence, reflects the expected random access performance of custom growth strategies without a specialized access method.
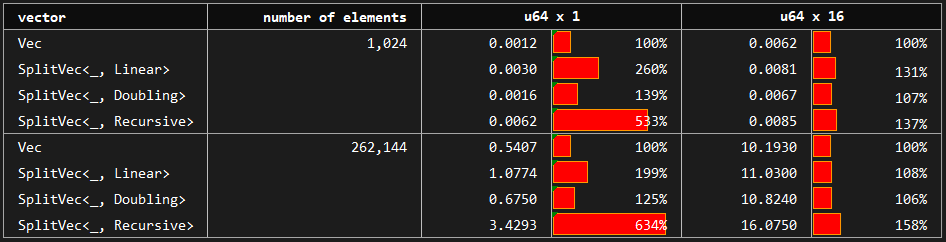
We can see that Linear is slower than Doubling. Random access performance of Doubling is at most 50% slower than the standard vector and the difference approaches to zero as the element size or number of elements gets larger.
Recursive, on the other hand, does not have constant time complexity for random access operation which can be observed in the table. It is between 4 and 7 times slower than the slower access for small elements and around 1.5 times slower for large structs. In order to make the tradeoffs clear and brief; SplitVec<_, Recursive> mainly differs from standard and split vector alternatives by random access performance (worse) and append performance (better).
You may see the benchmark at benches/serial_access.rs.
Here, we benchmark the case where we access each element of the vector in order starting from the first element to the last. We use the same standard vector as the baseline. For completeness, baseline is compared with Doubling, Linear and Recursive growth strategies; however, SplitVec actually uses the same iterator to allow for the serial access for any growth strategy.
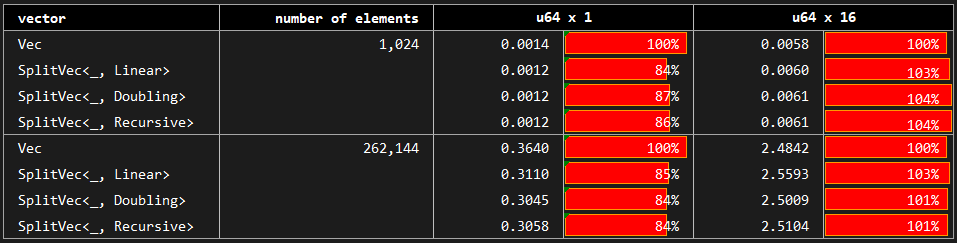
The results show that there are minor deviations but no significant difference between the variants.
You may see the benchmark at benches/serial_access.rs.
Appending vectors to vectors might be a critical operation in certain cases. One example is the recursive data structures such as trees or linked lists or vectors themselves. We might append a tree to another tree to get a new merged tree. This operation could be handled by copying data to keep a certain required structure or by simply accepting the incoming chunk (no-ops).
std::vec::Vec<_>,SplitVec<_, Doubling>andSplitVec<_, Linear>do the prior one in order to keep their internal structure which allows for efficient random access.SplitVec<_, Recursive>, on the other hand, utilizes its fragmented structure and follows the latter approach. Hence, appending another vector to it has no cost, simply no-ops. This does not degrade serial access performance. However, it leads to slower random access. Please refer to the corresponding benchmarks above.
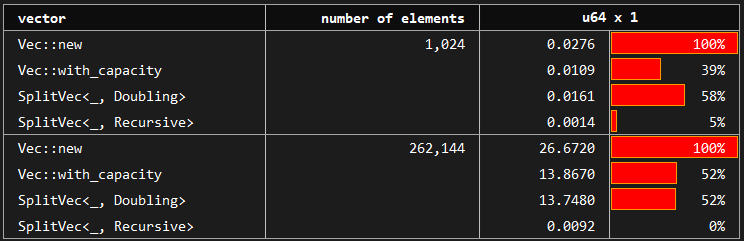
You may see that SplitVec<T, Doubling> (equivalently SplitVec<T> using the default) is around twice faster than std::vec::Vec when we don't have any prior information about the required capacity. When we have perfect information and create our vector with std::vec::Vec::with_capacity providing the exact required capacity, std::vec::Vec and SplitVec perform equivalently. This makes SplitVec a preferable option.
SplitVec<T, Recursive> on the other hand is a different story allowing zero-cost appends which is independent of size of the data being appended.
This library is licensed under MIT license. See LICENSE for details.