-
-
Notifications
You must be signed in to change notification settings - Fork 0
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
* CHange workflow to make rust docs * one workflow to rule them all * try to make rust docs
- Loading branch information
1 parent
a62cc7e
commit a214669
Showing
17 changed files
with
231 additions
and
1,255 deletions.
There are no files selected for viewing
This file was deleted.
Oops, something went wrong.
This file was deleted.
Oops, something went wrong.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
|
|
@@ -161,4 +161,3 @@ cython_debug/ | |
| #.idea/ | ||
| .vscode/ | ||
| *.parquet | ||
| *.bsp | ||
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file was deleted.
Oops, something went wrong.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,4 @@ | ||
| # Code Reference | ||
| To be generated. See [source code on GitHub](https://github.com/philiplinden/clocss-abm/tree/main/learning/demos/marcopolo-rs) | ||
|
|
||
|  |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,54 +1,91 @@ | ||
| # Model Structure | ||
| The code structure of the model will have a significant impact on its complexity | ||
| and performance. It is important for complexity to be minimized and performance | ||
| to be maximized in order for the results to be trusted and reproducible. | ||
| # Disclaimer | ||
|
|
||
| ## Entity-Component-System (ECS) | ||
| 1. The code in this repository is intended for analytical use for a specific | ||
| problem. It is not meant to be a general-purpose library. | ||
| 2. This project and its code are evolving as my personal understanding of | ||
| modeling and coding techniques on the way to discovering answers to questions | ||
| about the nature of a possible decentralized PNT service for the Moon. | ||
|
|
||
| # Code Organization | ||
|
|
||
| This project contains Python implementations and Rust implementations. | ||
|
|
||
| ## Python | ||
| Preliminary explorations were done in Python using the Mesa framework and the | ||
| Python package from nyx-space. You can find some iPy notebooks and Mesa models | ||
| that showcase elements of these packages, along with code reference thereof. | ||
|
|
||
| * [Project Mesa](https://github.com/projectmesa/mesa) | ||
| * [Nyx Space](https://github.com/nyx-space/nyx) | ||
|
|
||
| ## Rust | ||
|
|
||
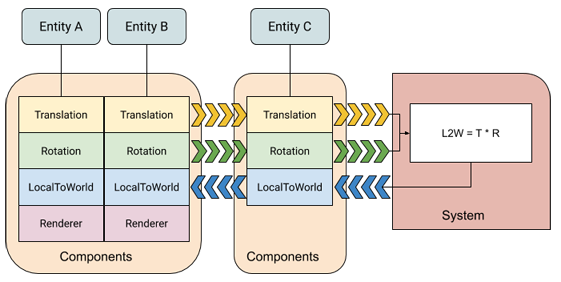
| The Rust implementation of this model is built around an Entity-Component-System | ||
| (ECS) architecture to make the most of the tools and ethos behind Rust and core | ||
| crates like Bevy. This approach also aligns well with the intent of the model. | ||
|
|
||
| An ECS architecture allows for a modular and scalable design, making it easier | ||
| to manage the simulation's complexity. Components store data, and systems | ||
| operate on that data, while resources hold shared data needed across systems. | ||
| This separation of concerns and data-driven approach is a key characteristic of | ||
| ECS. | ||
|
|
||
|  | ||
|
|
||
| [Rust Example](https://github.com/bevyengine/bevy/blob/main/examples/ecs/ecs_guide.rs) | ||
|
|
||
| In our simulation, the _schedule_ is critical. The engine or framework we choose | ||
| will need to decide the order of operations each "tick" of the simulation, and | ||
| we must consider this order when designing the system. | ||
|
|
||
| ## Choosing a Framework | ||
| ECS frameworks like [Bevy](https://bevyengine.org/) enable real-time, | ||
| interactive simulations, but it can be less deterministic and structured than a | ||
| discrete-event simulation, since it is [not specially tailored for that purpose](https://github.com/bevyengine/bevy/discussions/1678). | ||
|
|
||
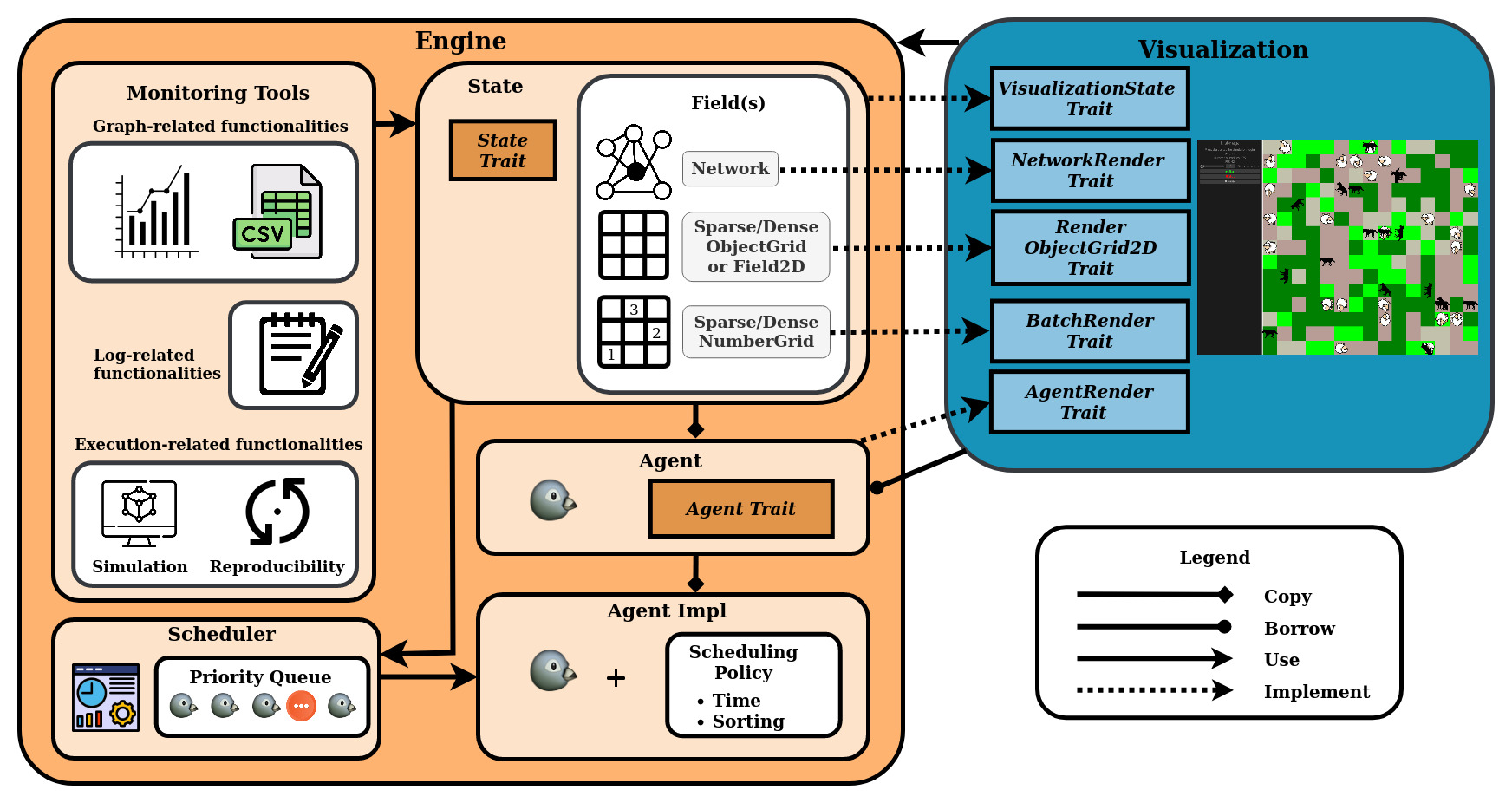
| [krABMaga](https://krabmaga.github.io/)[^1] is a purpose-built discrete-events | ||
| simulation engine writting in Rust and designed to be a batteries-included tool | ||
| for building Agent-Based Models (ABMs). While krABMaga can leverage Bevy to | ||
| visualize the model, under the hood it maintains a stricter state and execution | ||
| schedule based on the popular [MASON library](https://cs.gmu.edu/~eclab/projects/mason/). | ||
|
|
||
|  | ||
|
|
||
| In the end, both are ECS frameworks that can be used here. krABMaga adds some | ||
| creature comforts but encourages a certain style. Bevy is the toolbox that can | ||
| be used to build whatever you want, but elbow grease is a necessity. Since both | ||
| are ECS frameworks, our model can be built from first principles and we can | ||
| decide how to run and visualize it later. We might find that the best approach | ||
| is using both together. | ||
|
|
||
| [^1]: ```bibtex | ||
| @ARTICLE{AntelmiASIASIM2019, | ||
| author={Antelmi, A. and Cordasco, G. and D’Auria, M. and De Vinco, D. and Negro, A. and Spagnuolo, C.}, | ||
| title={On Evaluating Rust as a Programming Language for the Future of Massive Agent-Based Simulations}, | ||
| journal={Communications in Computer and Information Science}, | ||
| note={Conference of 19th Asia Simulation Conference, AsiaSim 2019 ; Conference Date: 30 October 2019 Through 1 November 2019; Conference Code:233729}, | ||
| year={2019}, | ||
| volume={1094}, | ||
| pages={15-28}, | ||
| doi={10.1007/978-981-15-1078-6_2}, | ||
| issn={18650929}, | ||
| isbn={9789811510779}, | ||
| }``` | ||
| 1. **Components:** | ||
| - **Clock Component (`Clock`):** | ||
| - Represents individual clocks in the simulation. | ||
| - Contains parameters such as speed, local gravity, clock time, and PTP | ||
| clock information. | ||
| - Includes a `Radio` component for radio communication parameters. | ||
| - **Quartz Oscillator Component (`QuartzOscillator`):** | ||
| - Represents properties of a quartz oscillator associated with a clock. | ||
| - Includes parameters like frequency offset, aging rate, and temperature | ||
| sensitivity. | ||
| - **Time Resource (`TimeResource`):** | ||
| - A resource to keep track of the time elapsed between frames. | ||
| - **TUI Stats Component (`TuiStats`):** | ||
| - Holds information related to TUI (Text-based User Interface) stats for | ||
| display. | ||
| - **PtpClock Component (`PtpClock`):** | ||
| - Represents PTP-related information, including offset and delay. | ||
| - **PtpMessage Component (`PtpMessage`):** | ||
| - Placeholder component for PTP message. | ||
| - **Radio Component (`Radio`):** | ||
| - Represents radio communication parameters such as transmitter power, | ||
| receiver sensitivity, and field of view. | ||
| 2. **Systems:** | ||
| - **Time Dilation System (`TimeDilationSystem`):** | ||
| - Calculates the time dilation factor for each clock based on speed, | ||
| local gravity, and oscillator parameters. | ||
| - Updates the clock time accordingly. | ||
| - **Simulate Clock System (`SimulateClockSystem`):** | ||
| - Simulates the behavior of each clock, updating parameters like speed, | ||
| local gravity, and aging. | ||
| - Handles the aging of quartz oscillators. | ||
| - **PtpSyncSystem (`PtpSyncSystem`):** | ||
| - Handles PTP synchronization logic, updating clock offset and delay | ||
| based on PTP messages. | ||
| - **Radio Communication System (`RadioCommunicationSystem`):** | ||
| - Simulates radio communication logic, determining entities within the | ||
| field of view and sending messages. | ||
| - **Update TUI System (`UpdateTuiSystem`):** | ||
| - Updates TUI stats based on simulation data. | ||
| - Prints the stats to the terminal for visualization. | ||
| - **PtpSyncSenderSystem (`PtpSyncSenderSystem`):** | ||
| - Sends PTP messages to synchronize clocks. | ||
| - **Radio Communication Sender System (`RadioCommunicationSenderSystem`):** | ||
| - Simulates sending radio messages to entities within the field of view. | ||
| 3. **Initialization:** | ||
| - In the Bevy app, entities are created with the relevant components, such | ||
| as `Clock`, `QuartzOscillator`, `PtpClock`, and `Radio`. | ||
| - The ECS systems are added to the app to process and update entities during | ||
| each frame. | ||
| 4. **Interaction:** | ||
| - Components hold the state of entities (e.g., clock parameters, oscillator | ||
| properties, PTP information, radio communication parameters). | ||
| - Systems process and update entities based on their components and the | ||
| logic defined in each system. | ||
|
|
||
| This ECS architecture allows for a modular and scalable design, making it easier | ||
| to manage the simulation's complexity, including PTP synchronization and radio | ||
| communication. Components store data, and systems operate on that data, while | ||
| resources hold shared data needed across systems. |
{kind=link}
Binary file not shown.
Oops, something went wrong.