
roboteq_control is a Roboteq motor control ros_control based. This package use a Roboteq device with a serial port.
All parameters, GPIO, Analogs port are controlled by this driver and from dynamic_reconfigure you can setup as you wish this board.
Device included:
| Brushed DC | Brushless DC | Sepex |
|---|---|---|
| HDC24xx, VDC24xx, MDC22xx, LDC22xx, LDC14xx, SDC1130, SDC21xx | HBL16xx, VBL16xx, HBL23xx, VBL23xx, LBL13xx, MBL16xx, SBL13xx | VSX18xx |
Advanced Digital Motor Controllers, as described in this document.
Clone on your catkin workspace this repository, download all dependencies and compile!
# Make catkin workspace if does not exist and clone this repo
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
git clone https://github.com/rbonghi/roboteq_control.git
# Install all dependecies
cd ..
rosdep install --from-paths src --ignore-src -r -y
# Compile package
catkin_makeDon't forget to add in your bash your catkin sources
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrcroslaunch roboteq_control roboteq.launch🚀 That's it!
This launch file can load different parameters such as:
- port - Serial port (defaut: /dev/ttyUSB0)
- config - Configuration file (Example in config file)
This driver include a dynamic_reconfigure topics to dynamically update all parameters of your robot

Detailed information are available on wiki
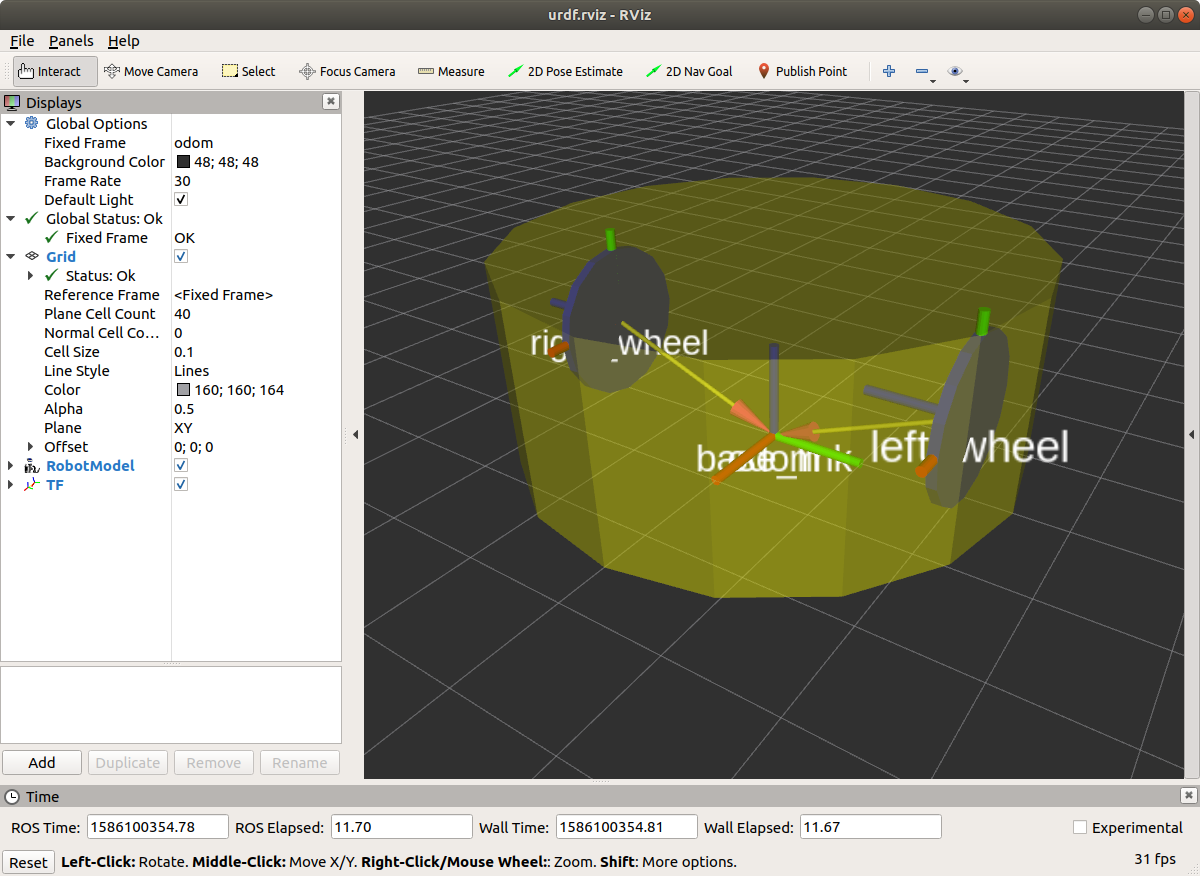
This package include a differential drive example to drive a robot.
roslaunch roboteq_control differential_drive.launchThere are different parameters than you can setup:
- size - default: 25cm
- radius - default: 8cm
- wheelbase - default: 0.40cm
To control this robot are available this topics
Subscribers:
- /velocity_controller/cmd_vel [geometry_msgs/Twist]
- /roboteq/emergency_stop [std_msgs/Bool]
Publishers:
- /velocity_controller/odom [nav_msgs/Odometry]
