Arduino Nano with CANBUS, GPS, GSM modules which send data at VPS with Telematic Web Application.
This project implements getting CAN-BUS data from vehicle and combing them with GPS location.
TCP/IP takes controls of the remote packets transmission and sends via GSM packets to Remote Server.


- The implemented system is based on wireless telemetry.
- On the left we see the transmission system while on the right the receiving system.
- Once the Server accepts the TCP connection, the device sends data in string format via GSM network.
- It supports connections to GSM, CANBUS with a speed of 500kbps as well as the ability to receive GPS data.
- for Client
- Arduino IDE + libraries installed
- Arduino Nano ATmega328
- GSM/GPRS Shield SIM900
- Ublox NEO-7M GPS Module
- CAN Bus Module - MCP2515
- Step-Down Voltage Regulator 7V 1A
- Step-Down Voltage Regulator 5V 3A
- OBD-II 16 pin male
- for Server
- Docker
- Good to have when developing
- Termite 2.6
- SocketTest3
- CAN Hacker 2
- OBD Simulator

Wire components as the diagram above.
Edit IP and Port info at line 125 of the code (remember to also inlcude libraries).
Upload code to device and then connect obd II at vehicle.
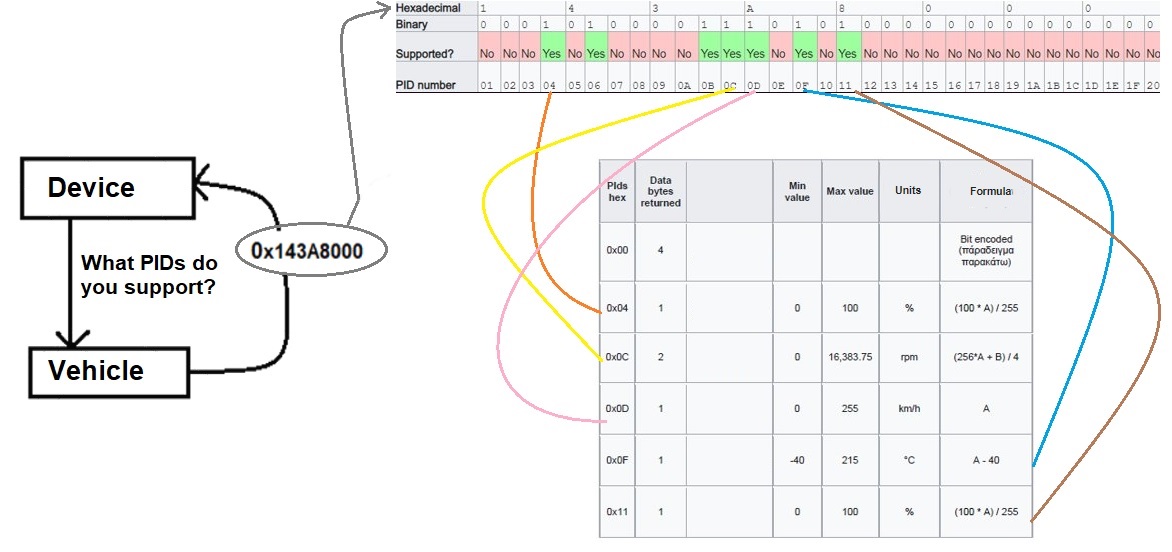
After finding what PIDs your vehicle supports, then you can start to parse packets based on PID number. Finally the packet is ready to send to remote IP (packet example below)
