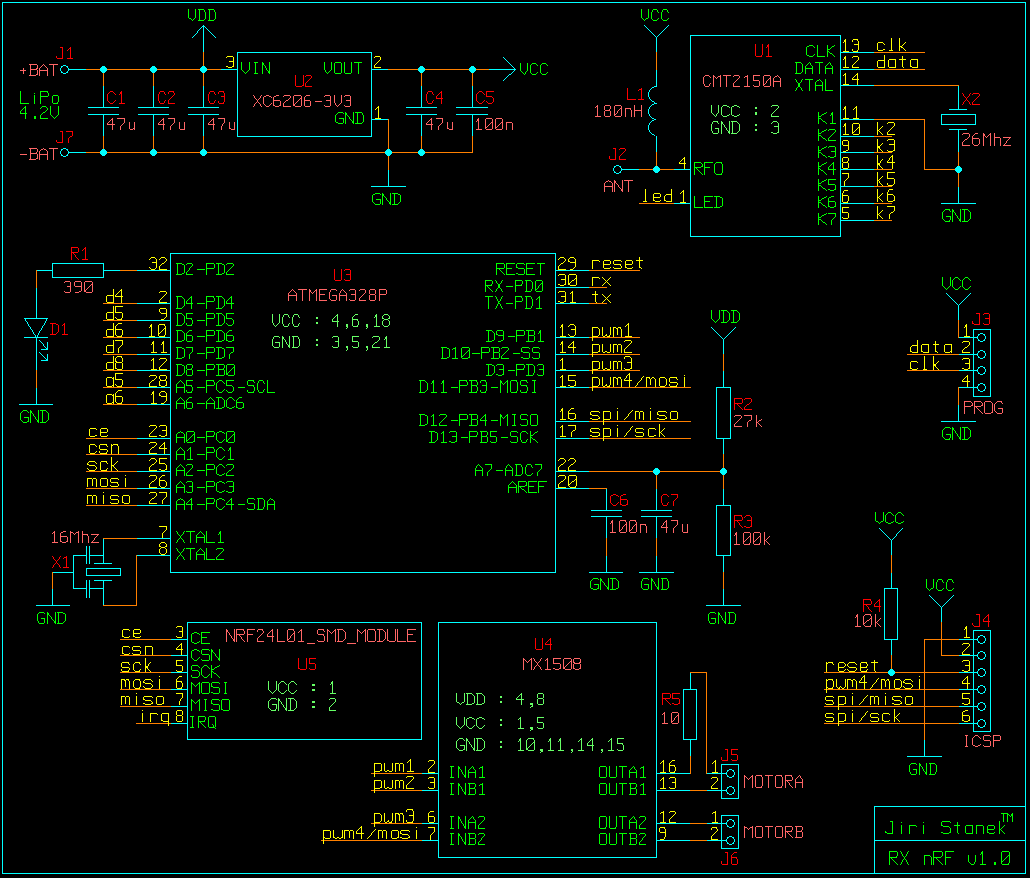
RC receiver with fixed RF channel and fixed address. Telemetry sends measured voltage and "fake" RSSI (the nRF24L01+ transceiver does not contain real RSSI and is only a rough measurement of lost packets).
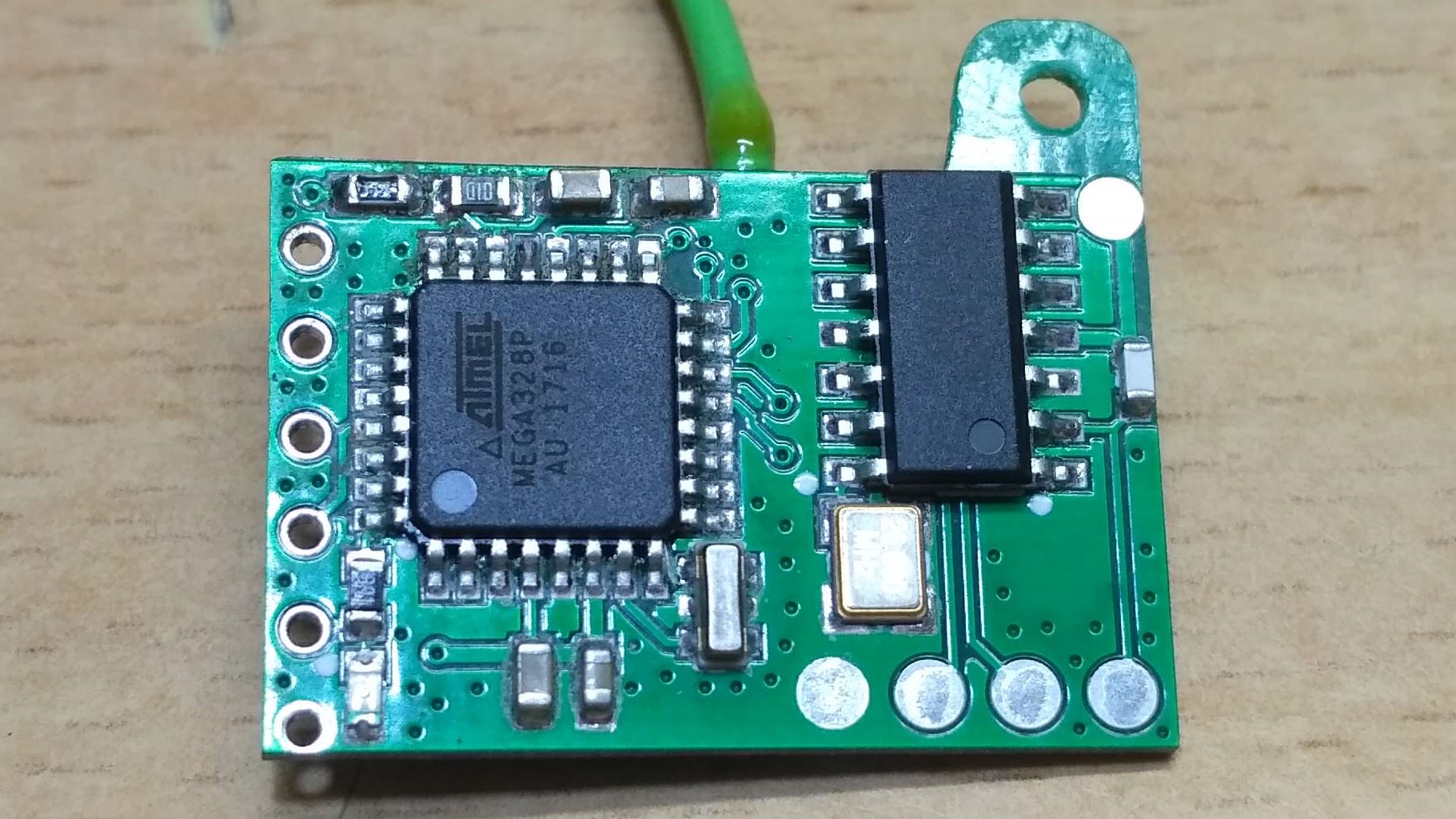
The hardware includes nRF24L01+ transceiver and ATmega328P processor. The motor driver IC is based on MX1208, MX1508, MX1515, MX1616, MX1919 and others similar, which uses 4x PWM input control signals. The option to adjust the brake is included in the code.
- Operating Voltage: 3.3V - 6.0V (target typically 4.2V, 1S LiPo)
- Working current of the motor driver (MX1508): 1.5A (peak current up to 2.5A)
The firmware will be used for cars, boats, tanks, robots and aircraft. The code is Arduino.
- TX_nRF24_2ch_OLED
- TX_nRF24_5ch_LED
- OpenAVRc
- Multiprotocol from my fork.
- <RF24.h> https://github.com/nRF24/RF24
- <DigitalIO.h> https://github.com/greiman/DigitalIO
- <Servo.h> Arduino standard library
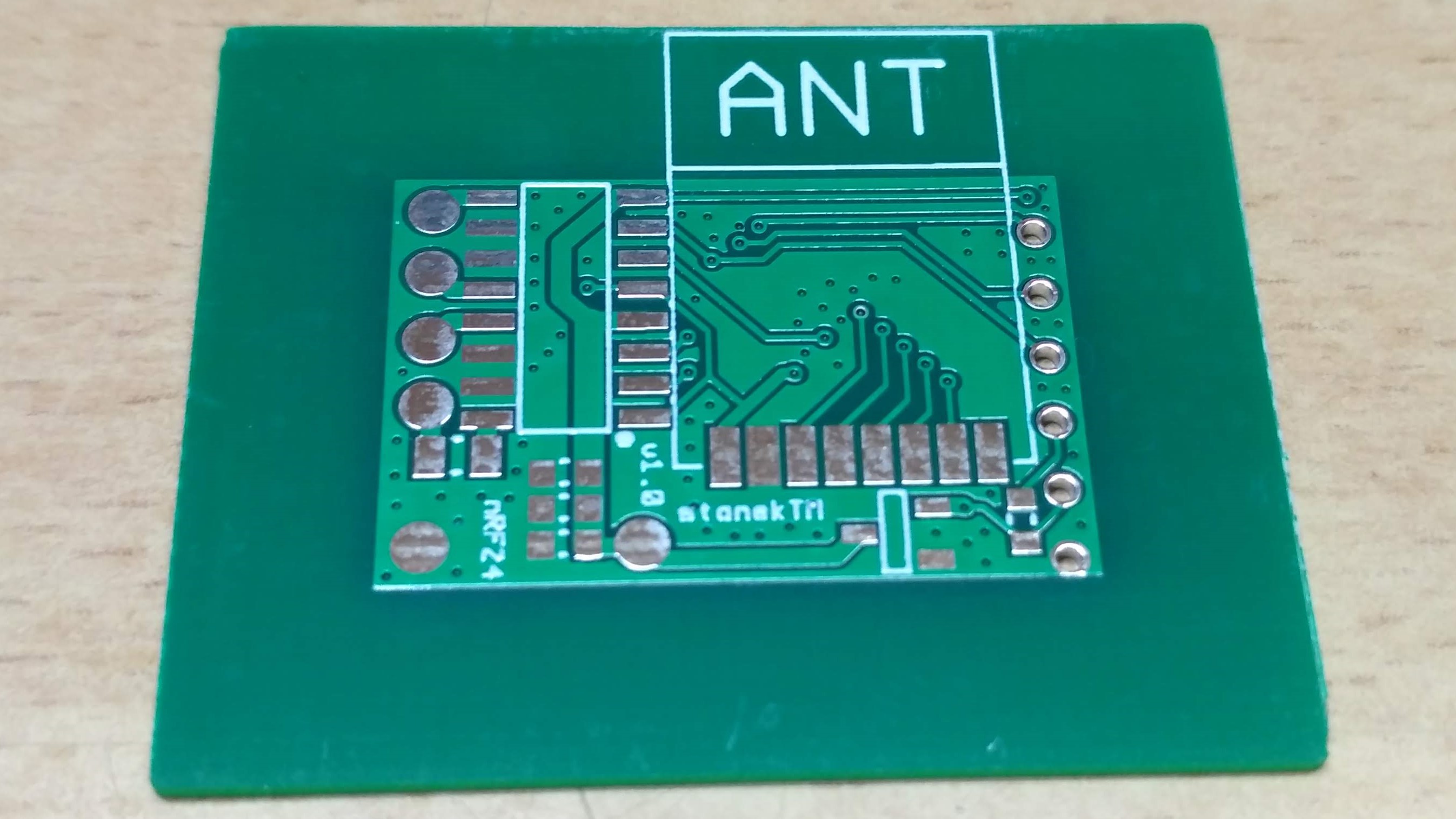
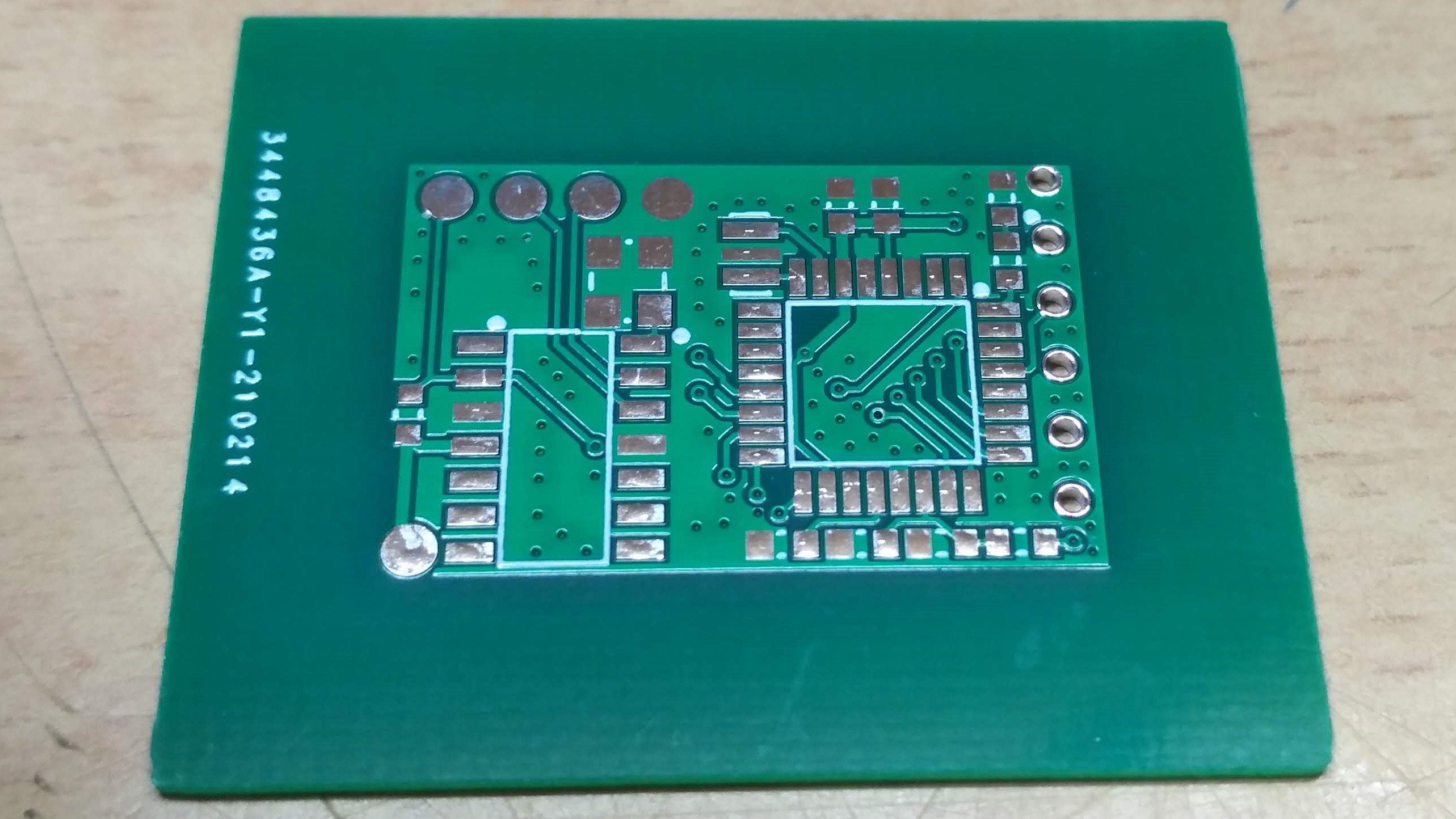
Micro RC receiver (motor driver, telemetry, lap reader transponder)

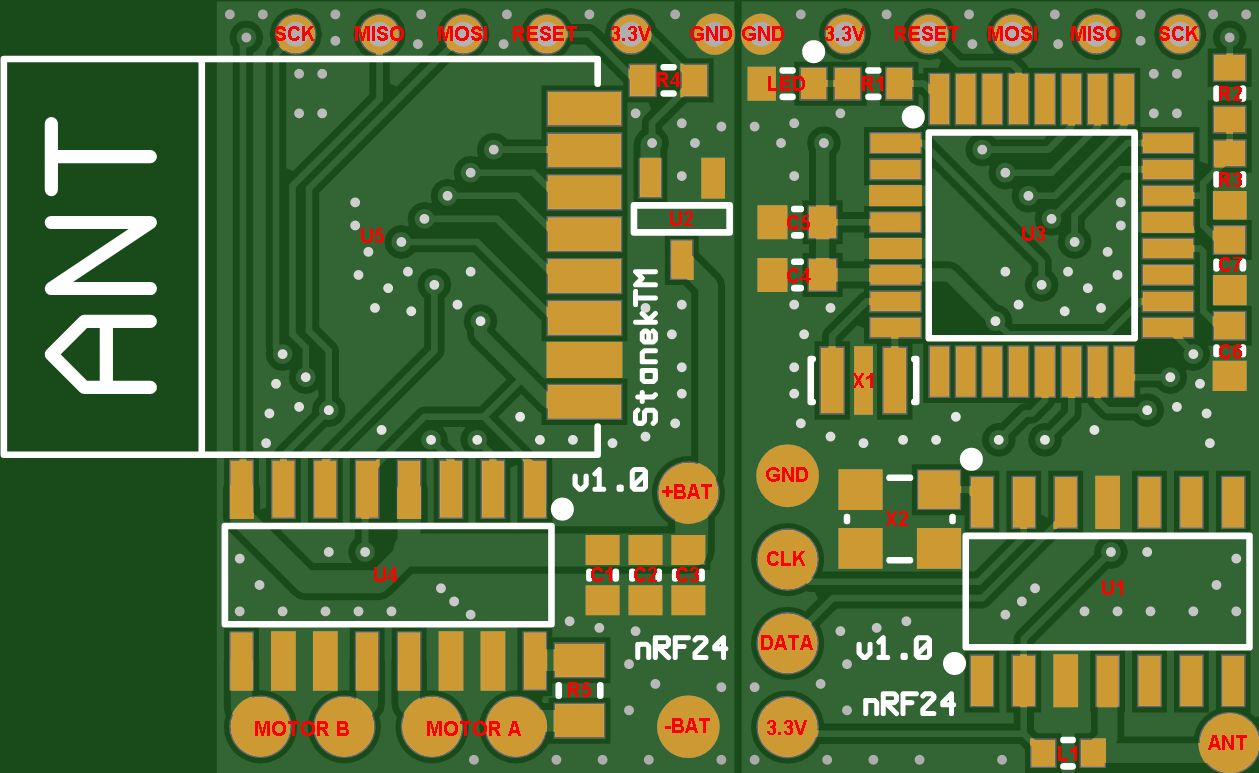
The schematic and PCB is created by a custom version of the open source PCB Elegance and manufactured by JLCPCB
{kind=link}
{kind=link}
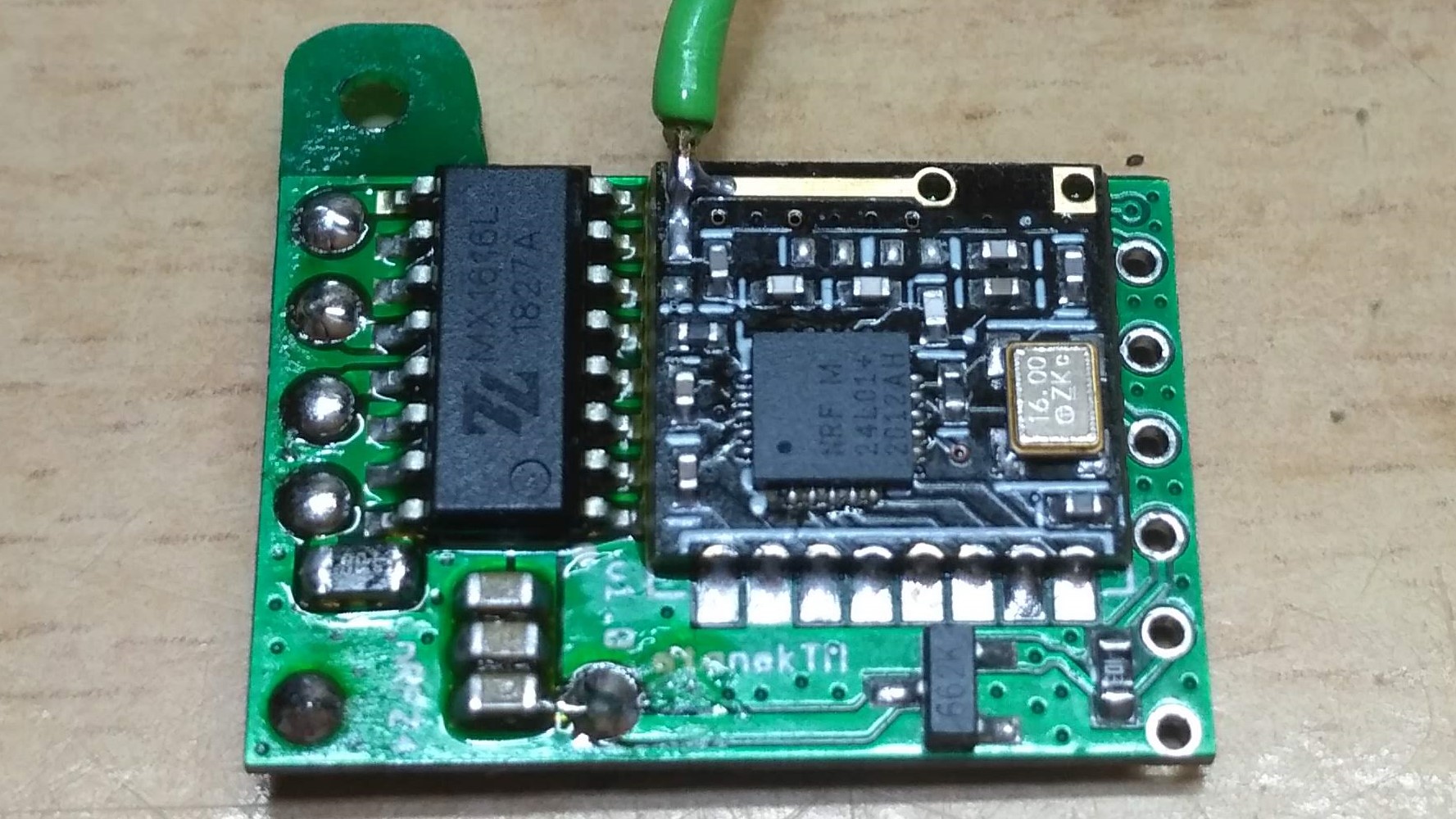
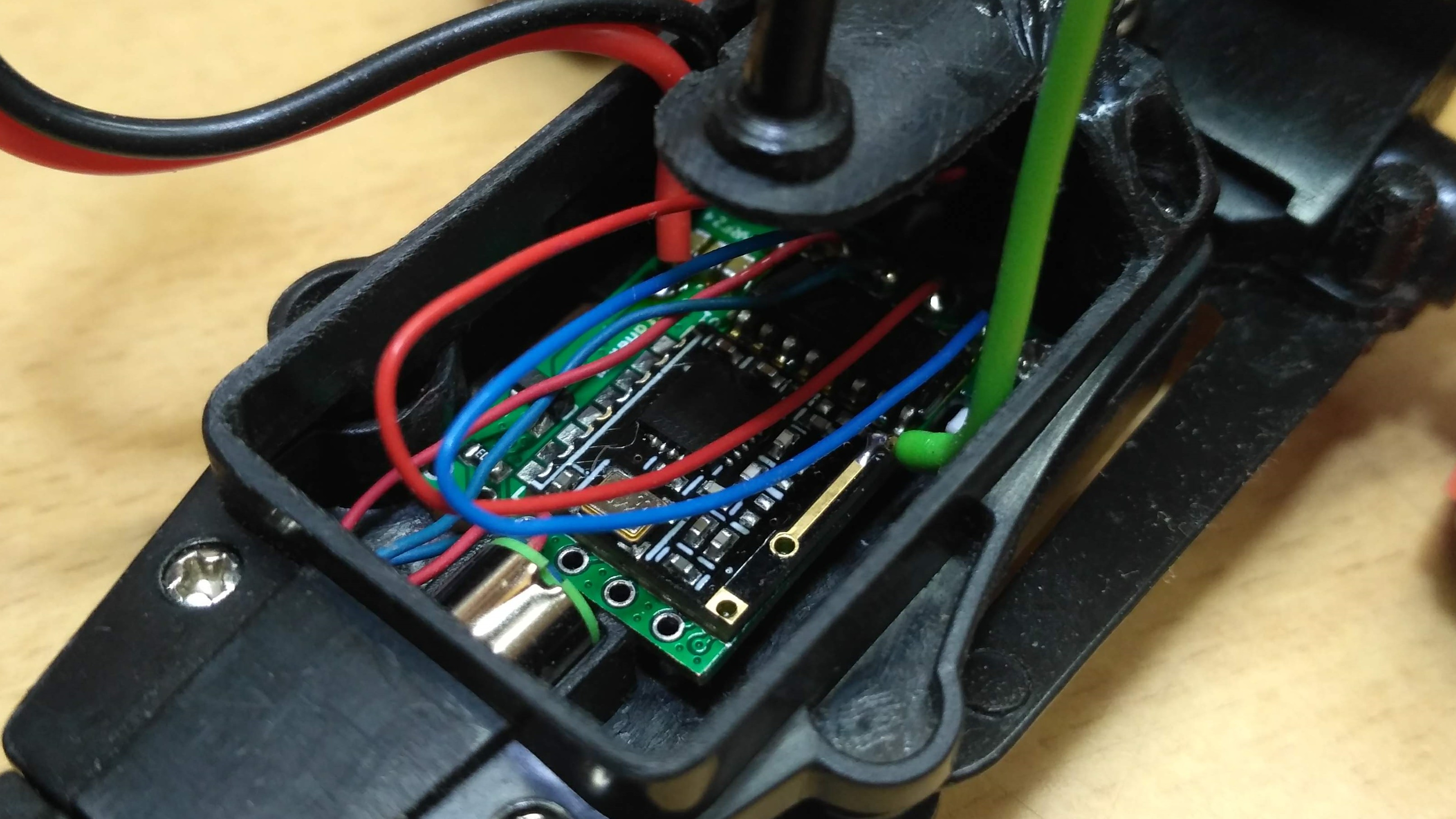


RC receiver prototype (motor-servo driver, telemetry)


RC receiver prototype (mix tank-arcade motor driver, telemetry)


