Esse é um projeto open-source de uma versão Faça você mesmo do nosso mouse de cabeça o Colibri! O objetivo principal dele é promover acessibilidade para pessoas com deficiências físicas do como tetraplegia, artrogripose, amputações e parilisia cerebral.

Compartilhe sua montagem e suas dúvidas no nosso fórum!
- Colibrino
- Índice
- Licença de Uso
- Materiais
- Montagem
- Modo de Uso
- Plano de Voo 🐦
- Materiais de referência
Este programa é um software livre. Você pode redistribuí-lo e/ou modificá-lo sob os termos da Licença Pública Geral GNU como publicada pela Free Software Foundation; na versão 3 da Licença, ou (a seu critério) qualquer versão posterior.
Este programa é distribuído na esperança de que possa ser útil, mas SEM NENHUMA GARANTIA; sem uma garantia implícita de ADEQUAÇÃO a qualquer MERCADO ou APLICAÇÃO EM PARTICULAR. Veja a Licença Pública Geral GNU para mais detalhes.
| Nome | Especificação | Documentação |
|---|---|---|
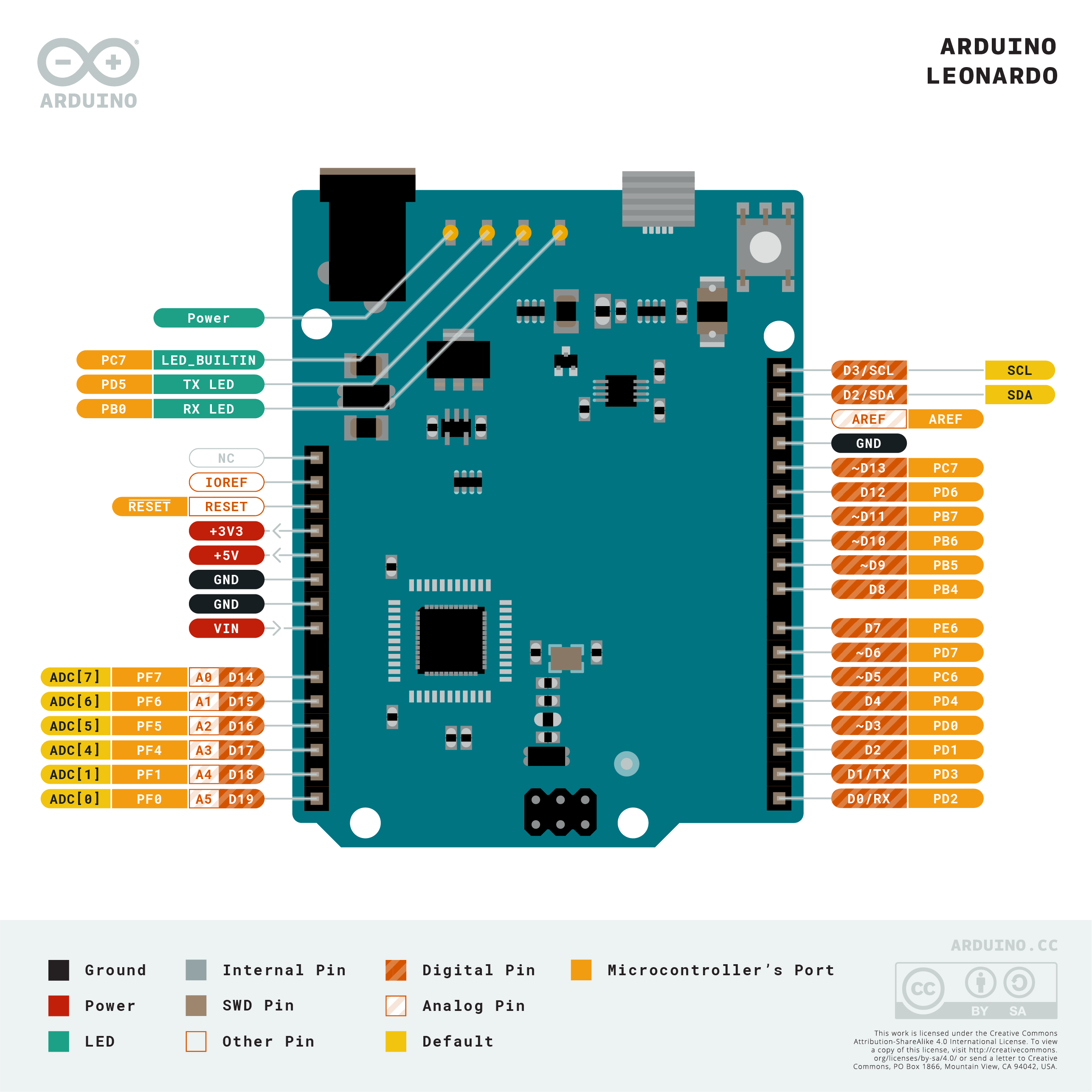
| Arduino Leonardo ou Micro Pro | Com Microcontrolador Atmega 32U4 | Pinagem Pro Micro Pinagem Leonardo |
| MPU6050 | Acelerômetro e Giroscópio | datasheet |
| TCRT 5000 | Sensor Infravermelho | datasheet |
| Cabo com 6 vias | Ligação entre o Arduino e os Sensores - | Ex.: cabo para alarme |
| Placa padrão ou protoboard | Base para montagem do circuito | |
| Leds | Indicador de piscada e de funcionamento | |
| Resistor | 1 x 4700Ω a 6800Ω - polarização do fototransistor 1 x 220Ω a 330Ω - restringe corrente do LED IR 1 x 10Ω - atenuar o buzzer |
|
| Buzzer | Indicador Sonoro da Piscada | |
| Cabo USB | Conexão entre computador e Arduíno | |
| Armação de Óculos | Suporte para os sensores |
{kind=link}

| Nome do Pino no Arduino | Componentes Conectados | Resistor? |
|---|---|---|
| VCC (3.3 ou 5V) | MPU-6050 VCC | |
| VCC (3.3 ou 5V) | TCRT5000 Coletor do Fototransistor | 3500Ω a 5000Ω |
| GND | MPU-6050 GND | |
| GND | TCRT5000 Emissor do Fototransistor | |
| GND | TCRT5000 Cátodo do LED IR (-) | |
| GND | Buzzer (-) | |
| 16 | Buzzer (+) | 0Ω a 10Ω |
| 15 | TCRT5000 Ânodo do LED IR (+) | 180Ω a 330Ω |
| A0 | TCRT5000 Coletor do Fototransistor |
- Conecte o Arduíno, Buzzer, Leds e Resistores no Protoboard.
- Para os sensores MPU6050 e TCRT 5000 é necessário solda-los com o fio de 6 vias.
- Realize as coneções mostradas no diagrama acima.
- Conecte o Arduíno ao PC usando o cabo USB.
- Grave o firmware no Arduino usando o Arduino IDE. No menu "Ferramentas", escolha a opção Arduino Leonardo na lista de placas.
- Instale o código utilizando o ambiente de desenvolvimento do Arduino devidamente configurado para a placa que está sendo usada.
- Deixe o Colibrino parado numa mesa sem perturbações até que um beep sonoro indique que ele está pronto para uso (nesse momento ele está calibrando). A calibração é feita apenas uma vez e se não ficar boa siga as intruções nna seção Calibração.
- Fixe o sensor MPU6050 em alguma armação de óculos.
- Use e aproveite. :D
- Compartilhe sua montagem e suas dúvidas no nosso fórum!
(montar um painel com imagens)
O Colibrino utiliza um tipo de sensor chamado de IMU (Unidade de Medidas Inerciais) para obter informação sobre a orientação espacial da cabeça. A IMU do Colibrino é o MPU-6050, um circuito integrado (acelerômetro + giroscópio) contendo estruturas mecânicas microscópicas capazes de sentir movimentos do corpo preso a ele e a força da gravidade. Essas estruturas mecânicas também interagem eletricamente com o circuito que mede os movimentos em números correspondentes à aceleração e à velocidade angular em três eixos. Os dados são filtrados e utilizados para calcular a posição da cabeça e, por fim, mover o cursor do mouse de forma correspondente.
O sensor de piscadelas detecta pequenas variações na reflexão de luz que ocorrem quando uma piscada bem forte é realizada em frente ao sensor. Primeiro a luz infravermelha é emitida por um LED no TCRT5000. A luz é pulsante para que o programa consiga comparar a reflexão com o LED aceso e apagado de forma a compensar variações da luz ambiente. Após ser refletida, a luz é captada por um fototransistor que converte a intensidade da luz em um sinal elétrico medido pelo Arduino.
A calibração efetuada após a primeira gravação do programa no colibrino é feita apenas uma vez. Contudo ela pode falhar devido a movimentações no colibrino durante o processo de calibração, levando a um mau funcionamento do aparelho. Para resolver isso , grave o código LimparCalibração que está dentro da pasta baixada e regrave o código principal mais uma vez. Isso levará o Colibrino para a mesma fase inicial de calibração, repita o procedimento de esperar até que o tempo de calibração conclua.
Com o colibrino devidamente montado para usá-lo basta mexer a cabeça com o oculos que está instalado o sensor. Contudo, segue abaixo uma lista de orientações.
- O Sensor MPU6050 deve estar colocado no óculos que vai ser usado, porém o TCRT deve estar conectado somente ao fio permitindo o ajuste.
- Para melhor detecção da piscadela é necessário mexer o fio que o sensor TCRT está conectado para mais próximo ao olho.
(explicar como que usa o colibrino - como posicionar e ajustar o sensor)
Existe inumeras funções que podem ser adcionadas ao Colibrino e algumas que estão no plano de voo da nossa equipe são:
- Scroll ao inclinar a cabeça para os lados
- Funções com gestos da cabeça
Estamos abertos a sugestões e feedbacks a todos :D Agradecemos a leitura <3