Segment core-flooding micro-CT images using CNN.
This work uses the U-Net architecture implemented by : https://github.com/jvanvugt/pytorch-unet
Training template and example using ipython notebook: https://yclipse.github.io/CNN-core-flooding-muCT/
The trained model can be downloaded via : https://drive.google.com/file/d/18-Gna1Xr8JFSIsWGmflSBow3VkO8tS1B/view?usp=sharing
Tutorial for muCT image processing and segmentation using scikit-image please visit : https://github.com/yclipse/muCTimage_processing_tutorial
PyTorch
CUDA toolkit (enable GPU acceleration)

This document is a training code template that only used 10 training images and trained for 50 epochs for tutorial purpose.
Users can test this code using the training images from https://github.com/yclipse/CNN-core-flooding-muCT.
Users can use their own dataset to train a CNN segmentation model for CT images, add customised functions and fine-tune the parameters for the best result.
%matplotlib inline
#import from installed python libraries
import torch
import os
import os.path
import torch.nn as nn
import torch.nn.functional as F
import matplotlib.pyplot as plt
import numpy as np
import glob
from PIL import Image
# import sys
# from joblib import Parallel, delayed
# import time
# import scipy.misc
print ('modules imported')
#import from local ipynb file
from ipynb.fs.full.function_kits import test_availability,im2array,imview,im_compare,rescale
from .defs.Unet import UNet
test_availability()
print (torch.cuda.is_available())
print ('torch Ver .', torch.__version__)modules imported
toolbox functions available
toolbox functions available
True
torch Ver . 1.0.0
img_dir='N:/CNN_SEG/figures/example/img/'
gt_dir='N:/CNN_SEG/figures/example/gt'
img_list=sorted(glob.glob(os.path.join(img_dir,'*.tif')))
gt_list=sorted(glob.glob(os.path.join(gt_dir,'*.tif')))Split the images into a training dataset, a validation dataset and a test dataset. Here I produced a 80%: 10%: 10% split. And pair each image with its corresponding ground truth.
train_set=(img_list[:8],gt_list[:8])
val_set=(img_list[8:9],gt_list[8:9])
test_set=(img_list[-1:],gt_list[-1:])The following two functions convert each image file into 'tensor' that is a multi-dimensional matrix containing elements of a single data type. It is basically the pytorch version of numpy array. The images are down-sampled (2x2 mean pooling) and cropped into a suitable size for the GPU. You need to adjust the code to fit the size of your own data and GPU.
from skimage.measure import block_reduce
def img2tensor(file,unsqueeze=False):
img=Image.open(file)
####################################################change this block according to your own data size and make some pre-processing
imarray=np.asarray(img)[110:1582,100:1572]
downsample=block_reduce(imarray, block_size=(2,2), func=np.mean)[120:616,120:616]
imarray_rescale=rescale(downsample)
imtensor = torch.from_numpy(imarray_rescale).type(torch.float)
####################################################change this block according to your own data size and make some pre-processing
if unsqueeze==True:
imtensor = torch.unsqueeze(imtensor, dim=0)
return imtensor
def label2tensor(file):
img=Image.open(file)
####################################################change this block according to your own data size and make some pre-processing
imarray=np.asarray(img)[110:1582,100:1572]
downsample=block_reduce(imarray, block_size=(2,2), func=np.mean)[120:616,120:616]
labels=np.zeros(downsample.shape)
labels[downsample==0]=0#bg #the groundtruth image is labelled with 0-127-255 for three classes, here I converted them to 1-2-3
labels[downsample==127]=1#oil
labels[downsample==255]=2#brine
####################################################change this block according to your own data size and make some pre-processing
imtensor = torch.from_numpy(labels).type(torch.float)
return imtensorDefine the Data_imoprter function to import the dataset into the CNN model when initialising training
from torch.utils.data import Dataset, DataLoader
class Data_importer(Dataset):
"""
A customized data loader.|
"""
def __init__(self, datalist,labellist):
""" Intialize the dataset
"""
self.x_data=datalist
self.y_data=labellist
self.len = len(datalist)
# You must override __getitem__ and __len__
def __getitem__(self, index):
""" Get a sample from the dataset
"""
traintensor= img2tensor(self.x_data[index],unsqueeze=True)
labeltensor= label2tensor(self.y_data[index])
#
return traintensor,labeltensor.long()
def __len__(self):
"""
Total number of samples in the dataset
"""
return self.lenROC curve is a graphical plot that illustrates the diagnostic ability of a binary classifier system as its discrimination threshold is varied.
The ROC curve is created by plotting the true positive rate (TPR) against the false positive rate (FPR) at various threshold settings. The true-positive rate is also known as sensitivity, recall or probability of detection in machine learning
TP = True positive; FP = False positive; TN = True negative; FN = False negative
precision: tp / (tp + fp) => how many selected items are relevant?
recall: tp / (tp + fn) => how many relevant items are selected?
F1: harmonic mean of precision and recall
accuracy:(tp + tn) / (tp + tn + fp + fn) => the proportion of true results (both true positives and true negatives) among the total number of cases examined
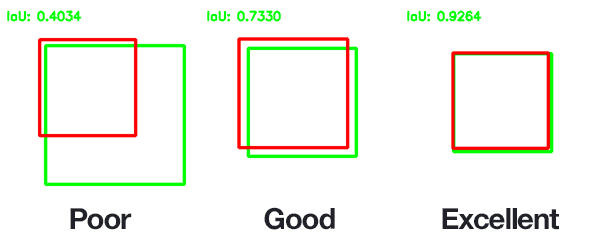
Intersection :area of overlap between the predicted area and the ground-truth area
Union: the area encompassed by both the predicted area and the ground-truth area.
IOU = Intersection/Union
def eval_metrics(pred,gt):
tp=((pred == 1) & (gt == 1)).sum()
# TN predict 0 label 0
tn=((pred == 0) & (gt == 0)).sum()
# FN predict 0 label 1
fn=((pred == 0) & (gt == 1)).sum()
# FP predict 1 label 0
fp=((pred == 1) & (gt == 0)).sum()
# precision=tp/ (tp + fp)
# recall = tp/ (tp + fn)
# F1 = 2 * (recall*precision) / (recall+precision)
rand = (tp + tn) / (tp + tn + fp + fn) #rand index
iou = tp / (tp + fp + fn) #Intersection over Union
return rand, iouThe CNN model output is a prediction of scores of each pixel belonging to a class. We use the softmax function to convert the scores into probabilities that are values between 0 and 1, and the three classes add up to 1. We classify the pixels with the largest probability of each class. This function below essentially convert the CNN prediction into segmentation labels.
def prob_to_labels(prediction):
m = nn.Softmax2d()
prob=m(prediction)
seg_labels=np.zeros(prob.cpu().detach().numpy()[0][0].shape)
rock=prob.cpu().detach().numpy()[0][0]
oil=prob.cpu().detach().numpy()[0][1]
brine=prob.cpu().detach().numpy()[0][2]
seg_labels[rock-oil-brine>0]=0
seg_labels[oil-rock-brine>0]=1
seg_labels[brine-oil-rock>0]=2
return seg_labelsThese two functions below will produce the rand index of each phase and the mean IoU as measurements of segmentation quality
import statistics
def threephase_accuracy(phase,seg_labels,gt):
p={'rock':0,'oil':1,'brine':2}
rand,iou=eval_metrics(seg_labels==p[phase],gt==p[phase])
return rand,iou
def measure_accuracy(prediction,y):
seg_labels=prob_to_labels(prediction)
gt=y.cpu().detach().numpy()[0]
rand_rock,iou_rock=threephase_accuracy(phase='rock',seg_labels=seg_labels,gt=gt)
rand_oil,iou_oil=threephase_accuracy(phase='oil',seg_labels=seg_labels,gt=gt)
rand_brine,iou_brine=threephase_accuracy(phase='brine',seg_labels=seg_labels,gt=gt)
mean_accuracy=statistics.mean([rand_rock,rand_oil,rand_brine])
mean_iou=statistics.mean([iou_rock,iou_oil,iou_brine])
return rand_rock,rand_oil,rand_brine,mean_iou
train_dataset=Data_importer(train_set[0],train_set[1])
train_loader=DataLoader(train_dataset,
batch_size=1,
shuffle=False,
num_workers=0
)
val_dataset=Data_importer(val_set[0],val_set[1])
val_loader=DataLoader(val_dataset,
batch_size=1,
shuffle=False,
num_workers=0
)Hyperparameters are pre-defined parameters that controls the overall learning behaviour of the CNN model
Use multiple epochs to train the same dataset multiple times. (often use shuffle to change traning sequence to get better resutls.)
Use batch_size to slice data into mini-batches
Learning rate controls the step size of learning.
Use batch normalisation to make activation funtion more sensitive
make training faster
adam > RMSprop > Momentum > SGD
EPOCHS = 50 # Use multiple epochs to train the same dataset multiple times.
BATCH_SIZE = 1 #Use batch_size to slice data into mini-batches
LR = 5e-5 # learning rate try 1e-4 later
L2_penalty=1e-5 #add a L2 penalty (regulisation) to alleviate over-fittingdevice = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
model = UNet(in_channels=1, n_classes=3, depth=5, wf=6, padding=True,
batch_norm=True, up_mode='upconv').to(device) #batch normalisation: To increase the stability of a neural network
optim = torch.optim.Adam(model.parameters(),lr=LR, weight_decay=L2_penalty) # accelerate gradient descent using Adamdic=["rand_rock","rand_oil","rand_brine",'mean_iou']
eval_dic={}
ave_acc={}
train_loss_rec=[]
val_loss_rec=[]
train_loss_ave=[]
val_loss_ave=[]
for i in range(len(dic)):
eval_dic[dic[i]]=[]
ave_acc[dic[i]]=[]
def ave_list(lst):
return sum(lst)/len(lst)Validation at the end of each training epoch. You can also do validation for every n epochs if you have many training epochs. The loss scores and accuracy measurements are printed every epoch to track the training process.
print('start training')
for epoch in range(EPOCHS):
###################
# train the model #
###################
model.train()
for iteration, (x,y) in enumerate(train_loader):
x=x.to(device)
y=y.to(device)
x = torch.autograd.Variable(x)
y = torch.autograd.Variable(y)
prediction = model(x) # [N, 2, H, W]
#get loss
loss = F.cross_entropy(prediction, y)
train_loss_rec.append(loss.data.cpu().detach().numpy())
optim.zero_grad()
loss.backward()
optim.step()
sys.stdout.write('\r epoch {} training {} steps train loss: {}'.format(epoch, iteration+1,loss.data.cpu().detach().numpy())) #print text progress
sys.stdout.flush()
print ('\r saving model..')
torch.save(model.state_dict(), 'N:\\CNN_SEG\\CODES\\Unet_example_epoch{}.pth'.format(epoch))
######################
# validate the model #
######################
#end of each training epoch
if epoch%1==0: #every 1 epoch validation
#save in every 1 epochs
print ('\r validating..')
#epoch_train_loss.append(loss.data.cpu().detach().numpy())
model.eval()
for i,(val_x,val_y) in enumerate(val_loader):
val_x=val_x.to(device)
val_y=val_y.to(device)
val_x = torch.autograd.Variable(val_x)
val_y = torch.autograd.Variable(val_y)
val_prediction = model(val_x) # [N, 2, H, W]
val_loss = F.cross_entropy(val_prediction, val_y)
val_loss_rec.append(val_loss.data.cpu().detach().numpy())
#get accuracy
tuple_dic=(rand_rock,rand_oil,rand_brine,mean_iou)=measure_accuracy(val_prediction,val_y)
#print progress
sys.stdout.write('\r validating {} steps'.format(i+1)) #print text progress
sys.stdout.flush()
for i in range(len(dic)):
eval_dic[dic[i]].append(tuple_dic[i])
for i in range(len(dic)):
ave_acc[dic[i]].append(ave_list(eval_dic[dic[i]]))
#plot eval accuracy
fig, axes = plt.subplots(ncols=1,nrows=2)
fig.set_size_inches(20, 8)
ax1,ax2=axes
#validation accuracy
for i in range(len(dic)):
ax1.plot(range(len(ave_acc[dic[i]])),ave_acc[dic[i]],'.-',label=dic[i],linewidth=6-i)
ax1.legend(loc=(1,0.5))
#validation loss
train_loss_ave.append(ave_list(train_loss_rec))
val_loss_ave.append(ave_list(val_loss_rec))
ax2.plot(range(epoch+1),train_loss_ave,'.-',label='train_loss')
ax2.plot(range(epoch+1),val_loss_ave,'.-',label='val_loss')
ax2.legend()
plt.savefig('N:/CNN_SEG/figures/example/train_val_history_epoch{}.png'.format(epoch+1), bbox_inches='tight')
plt.pause(0.05)
validating..aining 8 steps train loss: 0.6303515434265137
m=nn.Softmax2d()
prob=m(prediction)
brine=prob.cpu().detach().numpy()[0][2]
oil=prob.cpu().detach().numpy()[0][1]
solid=prob.cpu().detach().numpy()[0][0]
fig, axes = plt.subplots(nrows=1,ncols=3)
ax0, ax1,ax2 = axes
ax0.imshow(solid)
ax0.set_title('Probability Distribution - Solid',fontsize=18)
ax0.axis('off')
ax1.imshow(oil)
ax1.set_title('Probability Distribution - Oil',fontsize=18)
ax1.axis('off')
ax2.imshow(brine)
ax2.set_title('Probability Distribution - Brine',fontsize=18)
ax2.axis('off')
fig.set_size_inches(20, 14)
cax2 = ax2.imshow(brine, interpolation='nearest', vmin=0, vmax=1,cmap='seismic')
cax1 = ax1.imshow(oil, interpolation='nearest', vmin=0, vmax=1,cmap='seismic')
cax0 = ax0.imshow(solid, interpolation='nearest', vmin=0, vmax=1,cmap='seismic')
cb0 = fig.colorbar(cax0,ax=ax0,shrink=0.4)
cb1 = fig.colorbar(cax1,ax=ax1,shrink=0.4)
cb2 = fig.colorbar(cax2,ax=ax2,shrink=0.4)
cb0.ax.set_ylabel('Probability', rotation=90)
cb1.ax.set_ylabel('Probability', rotation=90)
cb2.ax.set_ylabel('Probability', rotation=90)
fig.subplots_adjust(left=None, bottom=None, right=None, top=None, wspace=None, hspace=None)
fig.tight_layout()
def imgresult(x,y,pred):
raw=x.cpu().detach().numpy()[0][0]
gt=y.cpu().detach().numpy()[0]
seg_labels=prob_to_labels(prediction)
fig, axes = plt.subplots(nrows=1,ncols=3)
ax0, ax1,ax2 = axes
ax0.imshow(raw,cmap='gray')
ax0.set_title('Raw Image',fontsize=18)
ax0.axis('off')
ax1.imshow(gt,cmap='plasma')
ax1.set_title('Ground Truth',fontsize=18)
ax1.axis('off')
ax2.imshow(seg_labels,cmap='plasma')
ax2.set_title('CNN Segmentation',fontsize=18)
ax2.axis('off')
fig.set_size_inches(20, 14)
plt.pause(0.01)
imgresult(x,y,prediction)
model_test = UNet(in_channels=1, n_classes=3, depth=5, wf=6, padding=True,
batch_norm=True, up_mode='upconv').to(device)
#model_test.load_state_dict(torch.load('8.pth'))test_dataset=Data_importer(test_set[0],test_set[1])
test_loader=DataLoader(test_dataset,
batch_size=BATCH_SIZE,
shuffle=True,
num_workers=0
)test_dic={}
test_ave_acc={}
for i in range(len(dic)):
test_dic[dic[i]]=[]
test_ave_acc[dic[i]]=[]
print('start testing')
model_test.eval()
for i,(test_x,test_y) in enumerate(test_loader):
test_x=test_x.to(device)
test_y=test_y.to(device)
test_x = torch.autograd.Variable(test_x)
test_y = torch.autograd.Variable(test_y)
test_prediction = model_test(test_x) # [N, 2, H, W]
#get accuracy
tuple_dic=(rand_rock,rand_oil,rand_brine,mean_iou)=measure_accuracy(test_prediction,test_y)
for i in range(len(dic)):
test_dic[dic[i]].append(tuple_dic[i])
for i in range(len(dic)):
test_ave_acc[dic[i]].append(ave_list(test_dic[dic[i]]))
#print test accuracy
print(test_ave_acc)start testing
{'rand_rock': [0.943792273673257], 'rand_oil': [0.9619252406347555], 'rand_brine': [0.9818670330385015], 'mean_iou': [0.31459742455775236]}