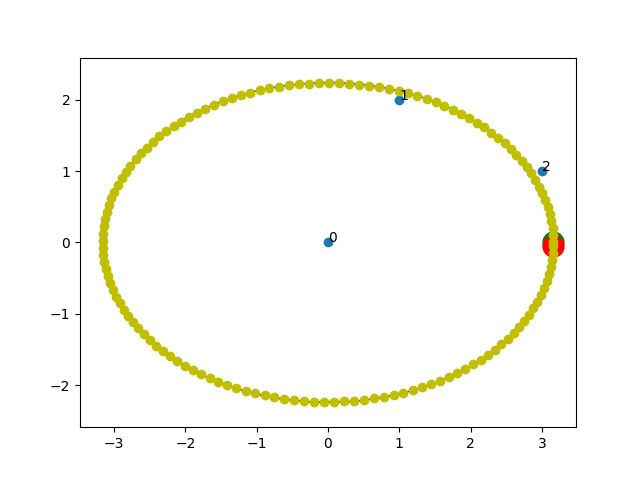
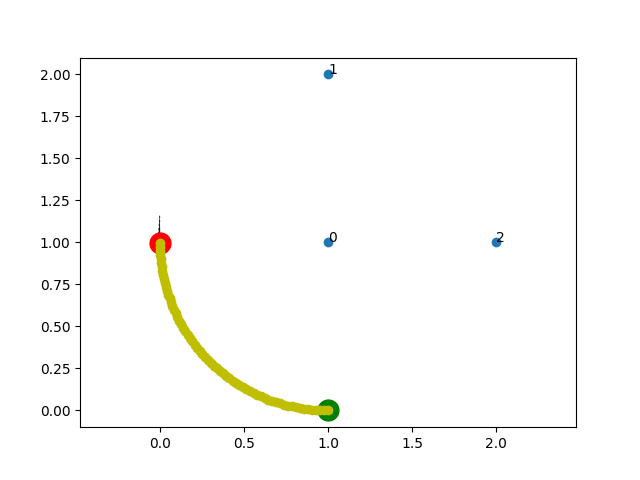
ROS Path Planning (Bezier, Bezier Spline, Cubic Spline, Dubins, Line, Circle, Ellipse, Arc)
- Numpy (pip install numpy)
- Scipy (pip install scipy)
- Matplotlib (pip install matplotlib)
- Dubins (pip install dubins)
- python Demo.py
The goal of this project is to plan the robot path with given set of points as list. The grometry shape path will be created with yaw angles. The resultant points and yaw angles can generate geometry_msgs/Pose Message (http://docs.ros.org/melodic/api/geometry_msgs/html/msg/Pose.html)