body_pose 是一个人体姿态识别的软件包。这个软件包可以从图片中识别出人体的耳朵,眼睛,鼻子,四肢的共17个特征点。其实现是通过深度学习网络利用tensorflow框架。此软件还支持多人同时识别。

- 安装tensorflow 由于小强上面没有Nvidia显卡,所以我们安装CPU版本的Tensorflow。小强的CPU支持一些高效的指令集,默认的Tensorflow为了能够在更多平台上运行,没有使用这些指令集。性能实际上没有发挥到最高。我们可以安装开启了这些优化指令的版本。
sudo pip install --ignore-installed --upgrade "https://github.com/lakshayg/tensorflow-build/raw/master/tensorflow-1.4.0-cp27-cp27mu-linux_x86_64.whl"- 安装软件包相关依赖
sudo pip install scipy scikit-image matplotlib pyyaml easydict cython munkres- 下载相关模型
git clone https://github.com/BluewhaleRobot/body_pose
# 单人模型
cd src/models/mpii
./download_models.sh
$ cd -
# 多人模型
./compile.sh
cd models/coco
./download_models.sh
cd -
- 运行单人识别测试程序
# 在src文件夹内运行
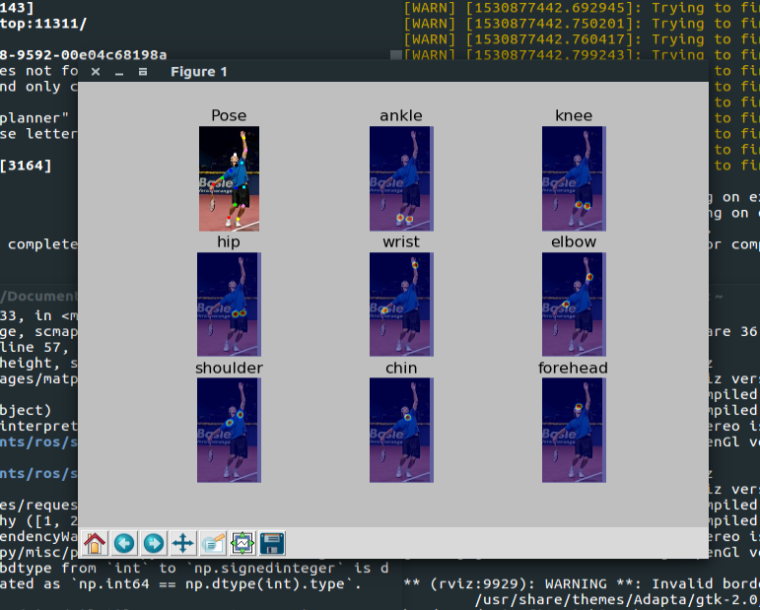
TF_CUDNN_USE_AUTOTUNE=0 python demo/singleperson.py运行成功后可以看到下图
- 运行多人识别的例子
TF_CUDNN_USE_AUTOTUNE=0 python demo/demo_multiperson.py成功运行后显示下面的图像

- 运行ROS服务
roslaunch body_pose body_pose_test.launch这个launch文件在小强上可以直接运行。但是如果不是在小强上你需要把usb_cam的节点换成自己的摄像头节点。
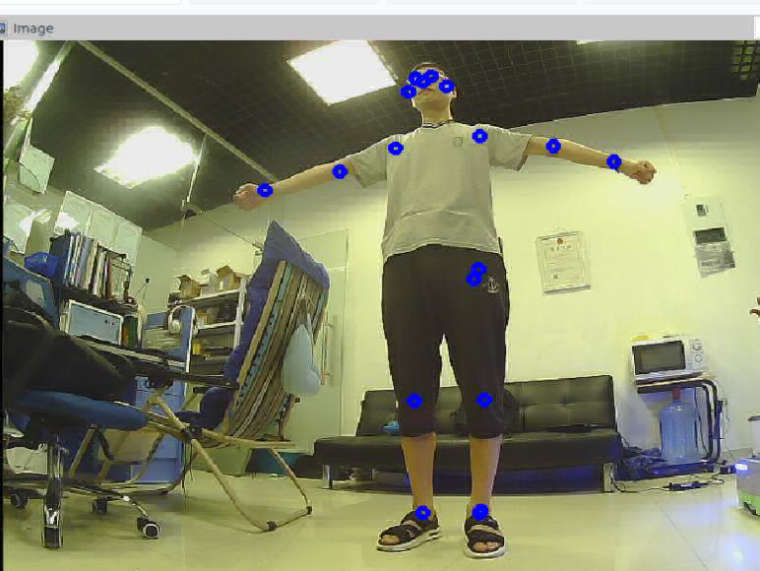
服务启动成功后会自动的识别摄像头中的图像。处理的结果会显示在 /body_pose_tester/processed_image topic 里面。可以利用摄像头显示处理结果。
rosrun image_view image_view image:=/body_pose_tester/processed_image
可以看到图中标了一些圆圈。这些都是被识别出的人体特征位置。
可以在自己的launch文件中添加这样的内容来启动节点
<node name="body_pose" pkg="body_pose" type="body_pose_node.py">
<param name="process_width" value="200" />
<param name="process_height" value="150" />
<param name="conf_min_count" value="3" />
</node>参数说明 process_width 内部处理宽度,process_height内部处理高度。可能采集的图片很大,这样处理起来非常费时间。可以通过这两个参数对图片进行压缩以提高处理速度。 conf_min_count最小可接受点数。如果在一个人上识别出的特征点小于这个值,则认为这个识别对象并不是人。
发布的服务
服务默认发布在 ~get_body_pose可以类型为BodyPose.srv。
详细的使用方法可以参照 body_pose_test_node.py 文件。